



















6 -
218
6 POSITIONING CONTROL
6.23.12 Home position return by the limit switch combined type
(1) Limit switch combined type
The proximity dog is not used in this method. Home position return can be
executed by using the external upper/lower limit switch.
When the home position return is started, it travels to direction of home position
return with "home position return speed". Deceleration is made by turning the
limit switch of home position return direction ON to OFF, it travels to reverse
direction of home position return with creep speed, and the zero point just before
limit switch is home position.
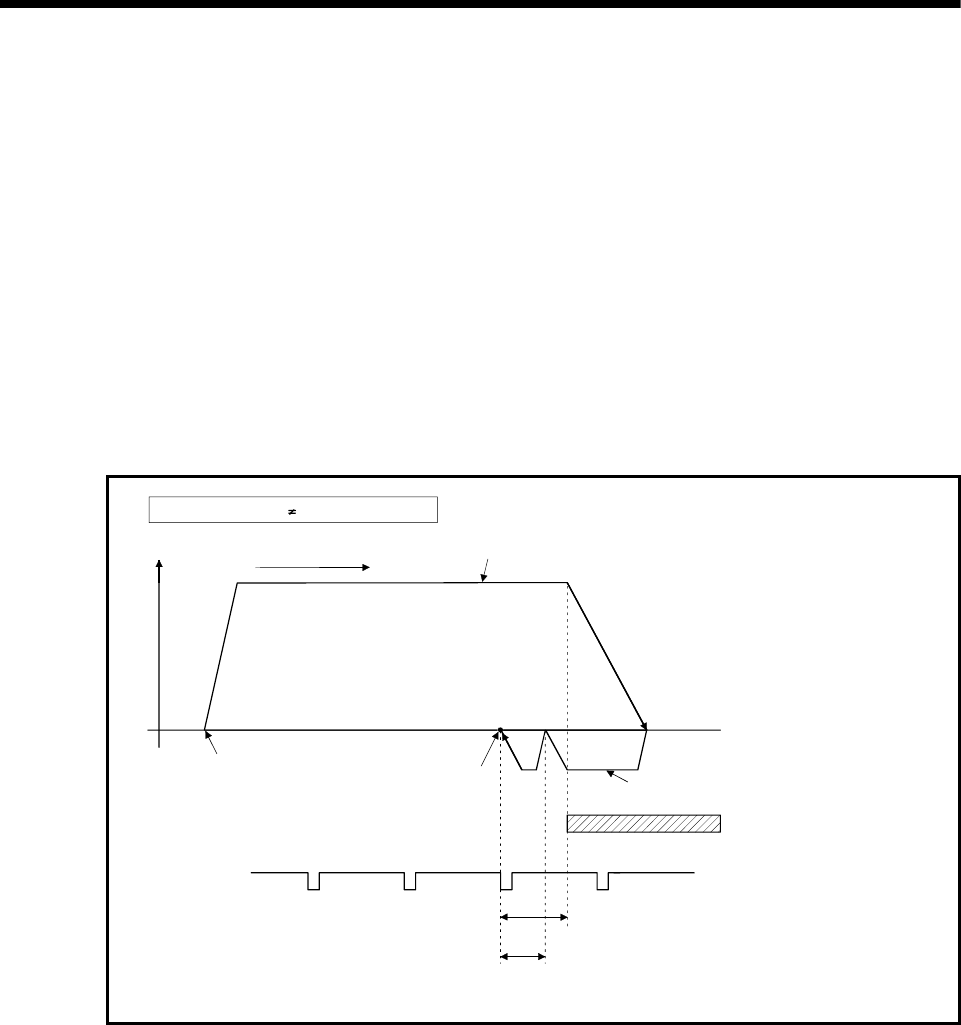
(2) Home position return by the limit switch combined type
Operation of home position return by limit switch combined type for setting the
limit switch in the home position return direction is shown below.
Acceleration time Deceleration time
Home position
return direction
Home position
return speed
V
Creep speed
Home position
Home position
return start
Zero point
External limit switch
The travel value in this range is stored in the
monitor register "travel value after proximity dog
ON".
The travel value in this range is stored in the
monitor register "home position return re-travel
value".
1)
2)
3)
(Indicates with normally closed contact)
1) It travels to preset direction of home
position return with the home
position return speed.
2) A deceleration stop is made by the
external limit switch ON to OFF.
3) After a deceleration stop, it travels to
reverse direction of home position
return with the creep speed, and the
home position return ends with the
zero point just before limit switch.
Fig. 6.43 Home position return operation by the limit switch combined type
(3) Home position return execution
Home position return by the limit switch combined type is executed using the
servo program in Section 6.23.16.