



















6. Axis Specifications Parameters
6.2 Zero Point Return Parameters
74
# Items Details
Setting range (unit)
2030
(PR)
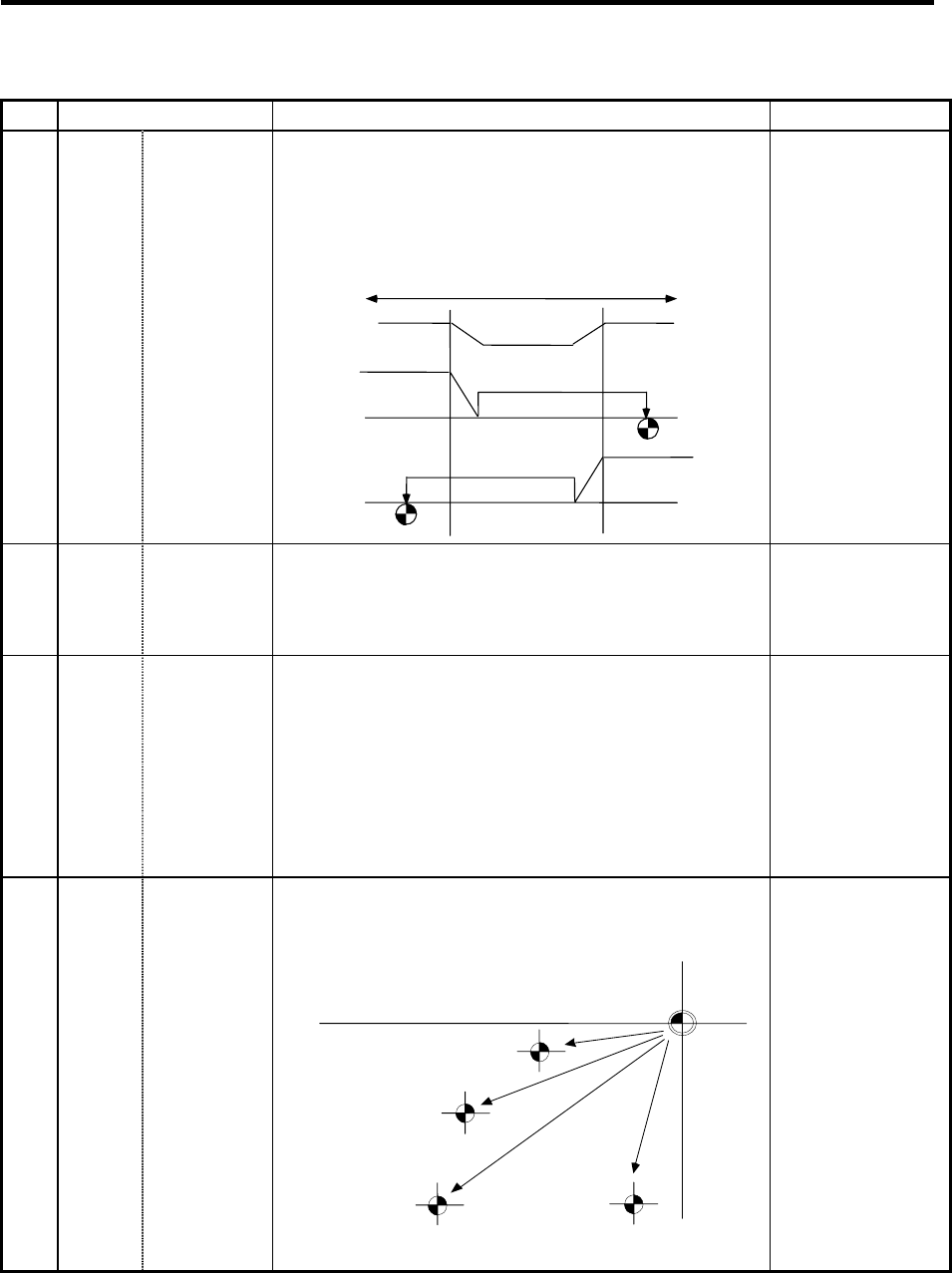
dir (−)
Reference
point
direction (−)
Set which side of the near-point dog the reference point
is at during reference point return.
<For dog type reference point return>
Direction in which zero point is established
as viewed from the near-point dog
Positive
direction
Negative
direction
dir
(
-
)
=0
dir
(
-
)
=1
0: Positive
direction
1: Negative
direction
2031 noref Axis without
reference
point
Specify the axis that does not have a reference point.
Before automatic operation starts, reference point
return is not required.
0: Normal
controlled axis
1: Axis without
reference point
2032 nochk Whether
reference
point return
is completed
not checked
The absolute and incremental commands can be
executed even if dog type (or Z phase pulse system)
reference point return is not completed.
Specify whether to check that the reference point return
is completed.
0: Checks
reference point
return
completion.
1: Does not check
reference point
return
completion.
2037
2038
2039
2040
G53ofs
#2_rfp
#3_rfp
#4_rfp
Reference
point #1 to
#4
Set up the position of the first, second, third, and fourth
reference points from the zero point of the basic
mechanical coordinates.
M
Basic machine coordinates
Reference point #3
Reference point #1
Reference point #2
Reference point #4
±999999.999
(mm)