



















9. Machine Error Compensation
9.1 Function Outline
270
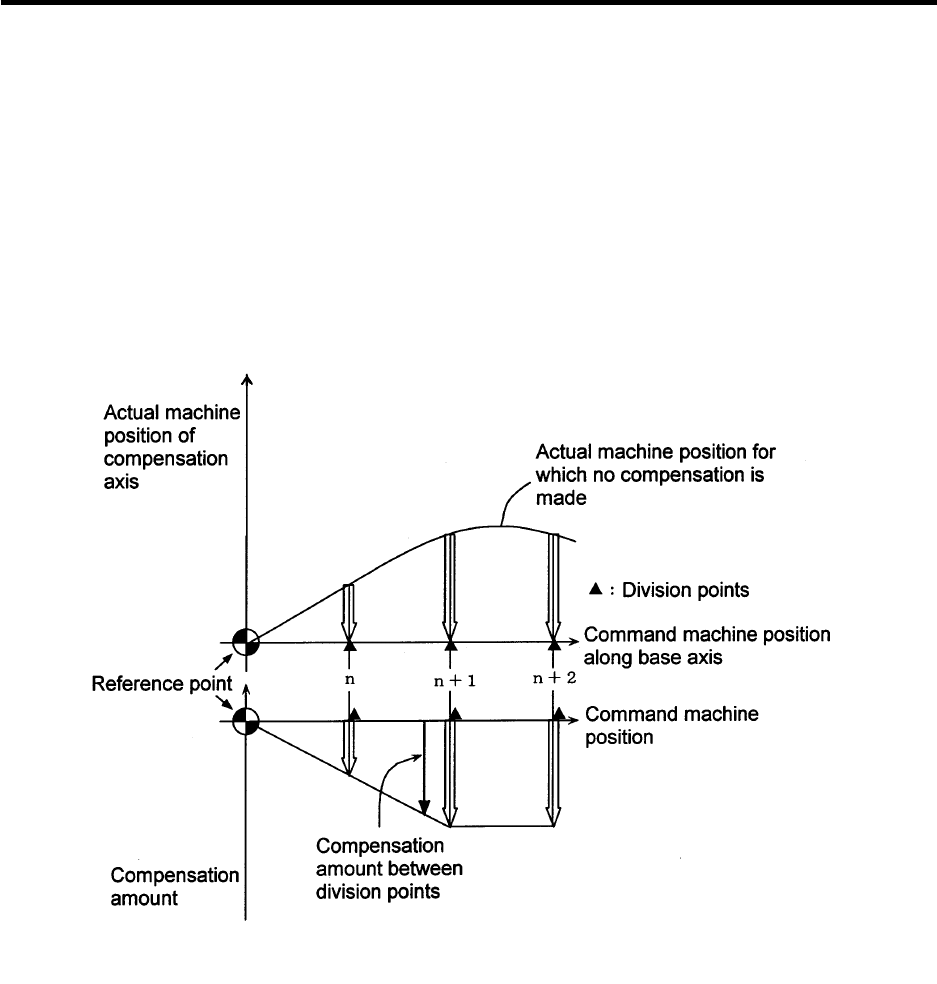
(2) Memorized relative position compensation
This method‚ according to the parameters specified in advance‚ compensates the relative position
error between two orthogonal axes caused by deflection of the moving stand.
For this‚ as shown in the following figure‚ specify the compensation amount in the compensation
axis direction in the division points obtained by equally dividing the machine coordinates of the
base axis.
The base axis is one of the two orthogonal axes to which relative position compensation applies.
This axis is used as the criterion for relative-error measurement. The compensation axis is the
coordinate axis that is orthogonal to the base axis. The compensation is actually made for this
coordinate axis.
The section between division points n and n+1 is compensated smoothly by linear approximation.
Relationship between the compensation amount and machine position