



















5. Base Specifications Parameters
24
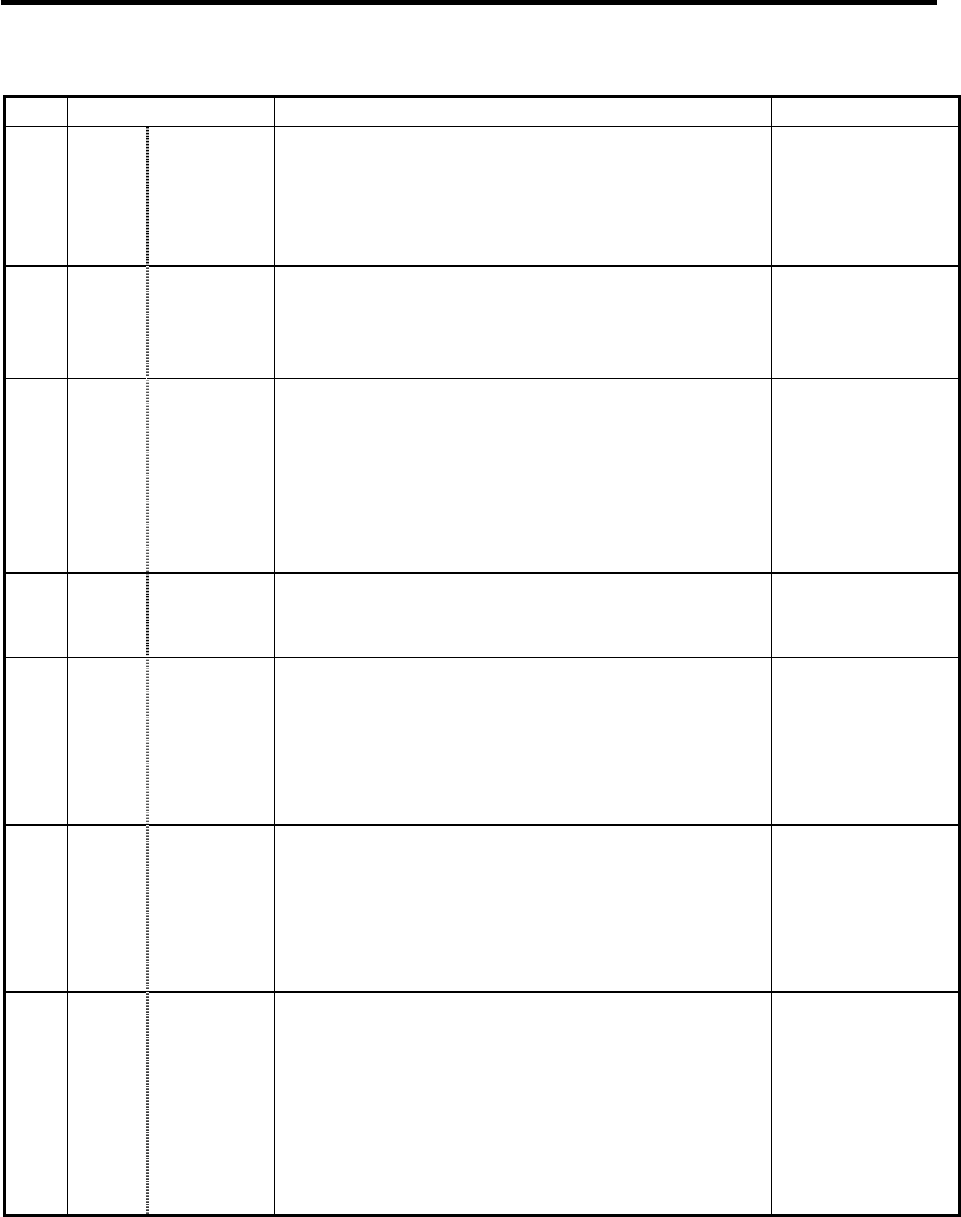
# Items Details
Setting range (unit)
1080 Dril_Z
(For M
system
only)
Specify
boring axis
Specify a fixed-cycle boring axis.
0: Uses an axis perpendicular to the selected plane
as the boring axis.
1: Uses the Z axis as the boring axis regardless of
the selected plane.
0/1
1081
Gmac_P
Give priority
to G code
parameter
Specify the G code priority relationship during the
macro call with the G command.
0: G code used in system is priority
1: Registered G code for call out is priority
0/1
1082 Geomet
(For L
system
only)
Geometric Specify the validity of the geometric function.
As the designated address code is used exclusively for
geometric‚ if "A" or "C" is used for the axis address or
2nd miscellaneous command code‚ "A" that is the axis
address may be handled as the geometric’s angle
specification. Take special care to the setting of the
axis name‚ etc.‚ when using this function.
0: Invalid
1: Valid
1084 RadErr Arc error Specify the tolerable error range when a deviation
occurs in the end point and center coordinate in the
circular command.
0 to 1.000 (mm)
1085 G00Drn G00 dry run Specify whether to apply dry run (feed with manual
setting speed instead of command feedrate) to the G00
command.
0: Does not apply to G00 (moves at rapid traverse
feedrate)
1: Applies to G00 (moves at manual set feedrate)
0/1
1086 G0lntp G00 non-
interpolation
Specify the G00 movement path type
0: Moves linearly toward the end point (interpolation
type)
1: Moves to the end point of each axis at the rapid
traverse feedrate for each axis
(non-interpolation)
0/1
1087
G96_G0
Constant
surface
speed
control by
rapid
traverse
feed
command
Specify how to handle the cycle speed for the G00
command when using the constant surface speed
control function.
0: Calculates the cycle speed constantly even
during G00 movement.
1: Calculates the cycle speed at the block end point
in the G00 command.
0/1