



















16. Auxiliary Axis Parameters
292
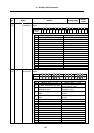
No. Name Details Setting range
Default
value
7 ATU Auto-tuning Set the adjustment of the auto-tuning. Do not set values without a description.
0 1 0 2 (Default setting value)
Setting
value
Details
1
Low response (low-rigidity loads, loads
which easily vibrate)
2 Standard setting value
3 Standard setting value
4 Standard setting value
5
High response (high-rigidity loads, loads
which do not easily vibrate)
Setting
value
Details
0 Standard
2
Large friction amount (set the position loop
gain slightly lower)
Setting
value
Details
0 Only auto-tuning PG2, VG2, VIC, and GD2.
1
Auto-tuning PG1, PG2, VG1, VG2, VIC,
and GD2 (total gain).
(Standard setting)
2 No auto-tuning.
8 PG1 Position loop
gain 1
Set the position loop gain for the model loop.
Determine the tracking ability regarding the
position commands.
4 to 1000 (1/s) 70
9
(Not used.) 0
10 EMGt Deceleration
control time
constant
Set the deceleration time from the clamp speed
(Aspeed1). For normal rapid traverse, set the
same value as the acceleration/deceleration time
constant.
0 to 32768 (ms) 500
11
(Not used.) 0
12
(Not used.) 0
13 MBR Vertical axis
drop
prevention
time
Input the time the servo OFF is delayed during
servo OFF command. Increase the setting by
100ms at a time and set the minimum value where
the axis does not drop.
0 to 1000 (ms) 100