


















6. Axis Specifications Parameters
6.1 Axis Specifications Parameters
66
6. Axis Specifications Parameters
6.1 Axis Specifications Parameters
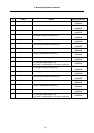
After setting up the parameter (PR) listed in the table, turn off the NC power. To validate the
parameter, turn on the power again.
# Items Details
Setting range
(unit)
2001 rapid Rapid
traverse
feedrate
Set up the rapid traverse feedrate for each axis. The
maximum value to be set differs with mechanical
systems.
1 to 1000000
(mm/min)
2002 clamp Cutting
feedrate for
clamp
function
Define the maximum cutting feedrate for each axis.
Even if the feedrate in G01 exceeds this value‚ the
clamp will be applied at this feedrate.
1 to 1000000
(mm/min)
2003
(PR)
smgst Acceleration
and deceler-
ation modes
Specify acceleration and deceleration control modes.
OT3 OT2 OT1 C3 C1 LC R3 R1 LR
FEDCB
A
9876543210
(Note) Set 0 in null bits.
Rapid traverse feed acceleration and deceleration
types
LR: Linear acceleration/deceleration
R1: Primary delay
R3: Exponential acceleration and linear
deceleration
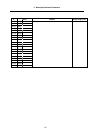
(Note) Designate “F” with bits 0 to 3 for rapid traverse
with acceleration/deceleration by software.
Note that the acceleration/deceleration by
software will not applied on such case as
follows;
(1) When the parameters are set as “#1205
G0bdcc” = “1” (acc/dec before G00 is
valid) and “#1086 G0Intp” = “0” (G00
non-interpolation invalid), the
acceleration/deceleration before
interpolation will be applied to the
following operation.
(a) Travel by G00 command
(b) Travel from G28/G30 command start
point to the intermediate point
(c) Travel from G29 command reference
to the intermediate point
(Continued on the next page)
Specify the modes
in hexadecimal
notation.