


















5. Base Specifications Parameters
21
# Items Details
Setting range (unit)
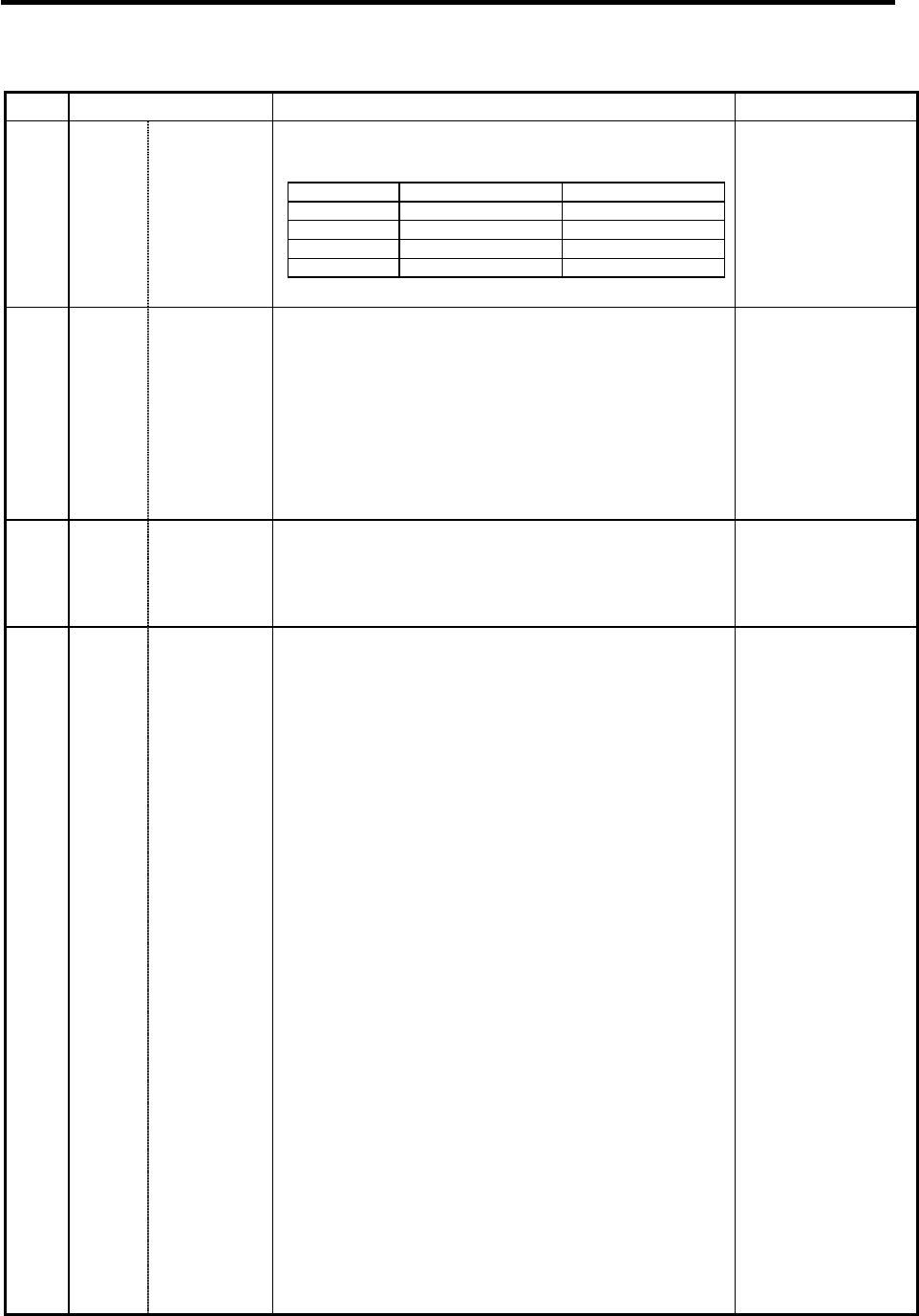
1062 T_cmp Tool offset
function
Specify whether the tool length offset and wear
compensation is valid during T command execution.
0 to 3
1063 mandog Manual
dog-type
The initial return to the reference point is performed
with dog-type return after the power is turned on‚ and
the coordinate system is established.
Specify the manual reference point return method
after the coordinate system is established with this
parameter.
(This setting is not required when using absolute
position detection.)
0: High speed
return
1: Dog-type
1064
(PR)
svof Error
correction
Specify whether to correct the error when the servo is
off.
0: Does not
correct the error
1: Corrects the
error
1065 JOG_H JOG
response
type
Set up an improved JOG response type.
0: Conventional specification
The system is started and stopped by signals
via ladder without reference to external input
signals.
1: Type 1
The system is started up and stopped by
external signals.
2: Type 2
The system is started up and stopped by
performing the AND operation for external
signals and signals via ladder.
3: Type 3
The system is started up when signals via
ladder rise. It is stopped when external signals
and signals via ladder fall.
4: Type 4
Reference point return mode:
The system is started up and stopped by
signals via ladder without reference to
external input signals (conventional
specification).
Non-reference point return mode:
The system is started up and stopped by
performing AND for external signals and
signals via ladder (type 2).
0 to 4
Setting value Tool length offset Wear compensation
0 Valid Valid
1 Valid Invalid
2 Invalid Valid
3 Invalid Invalid