



















12. Position Switch
12.1 Outline of Function
285
Position switch numbers of PSW1 to PSW16 and signal devices
<axis> <dog1> <dog2>
1st part
system
2nd part
system
3rd part
system
4th part
system
5th part
system
6th part
system
7th part
system
PSW1 7501 7502 7503 X660 X6E0 X760 X7E0 X860 X8E0 X960
PSW2 7511 7512 7513 X661 X6E1 X761 X7E1 X861 X8E1 X961
PSW3 7521 7522 7523 X662 X6E2 X762 X7E2 X862 X8E2 X962
PSW4 7531 7532 7533 X663 X6E3 X763 X7E3 X863 X8E3 X963
PSW5 7541 7542 7543 X664 X6E4 X764 X7E4 X864 X8E4 X964
PSW6 7551 7552 7553 X665 X6E5 X765 X7E5 X865 X8E5 X965
PSW7 7561 7562 7563 X666 X6E6 X766 X7E6 X866 X8E6 X966
PSW8 7571 7572 7573 X667 X6E7 X767 X7E7 X867 X8E7 X967
PSW9 7581 7582 7583 X670 X6F0 X770 X7F0 X870 X8F0 X970
PSW10 7591 7592 7593 X671 X6F1 X771 X7F1 X871 X8F1 X971
PSW11 7601 7602 7603 X672 X6F2 X772 X7F2 X872 X8F2 X972
PSW12 7611 7612 7613 X673 X6F3 X773 X7F3 X873 X8F3 X973
PSW13 7621 7622 7623 X674 X6F4 X774 X7F4 X874 X8F4 X974
PSW14 7631 7632 7633 X675 X6F5 X775 X7F5 X875 X8F5 X975
PSW15 7641 7642 7643 X676 X6F6 X776 X7F6 X876 X8F6 X976
PSW16 7651 7652 7653 X677 X6F7 X777 X7F7 X877 X8F7 X977
Instead of the dog switch provided on the machine axis‚ the coordinate values indicating imaginary
dog positions (dog1 and dog2) on the coordinate axis of the axis name preset with axis are set with
the position switches (PSW1 – PSW16). When the machine reaches the position‚ the signal is output
to the device corresponding to the PLC interface.
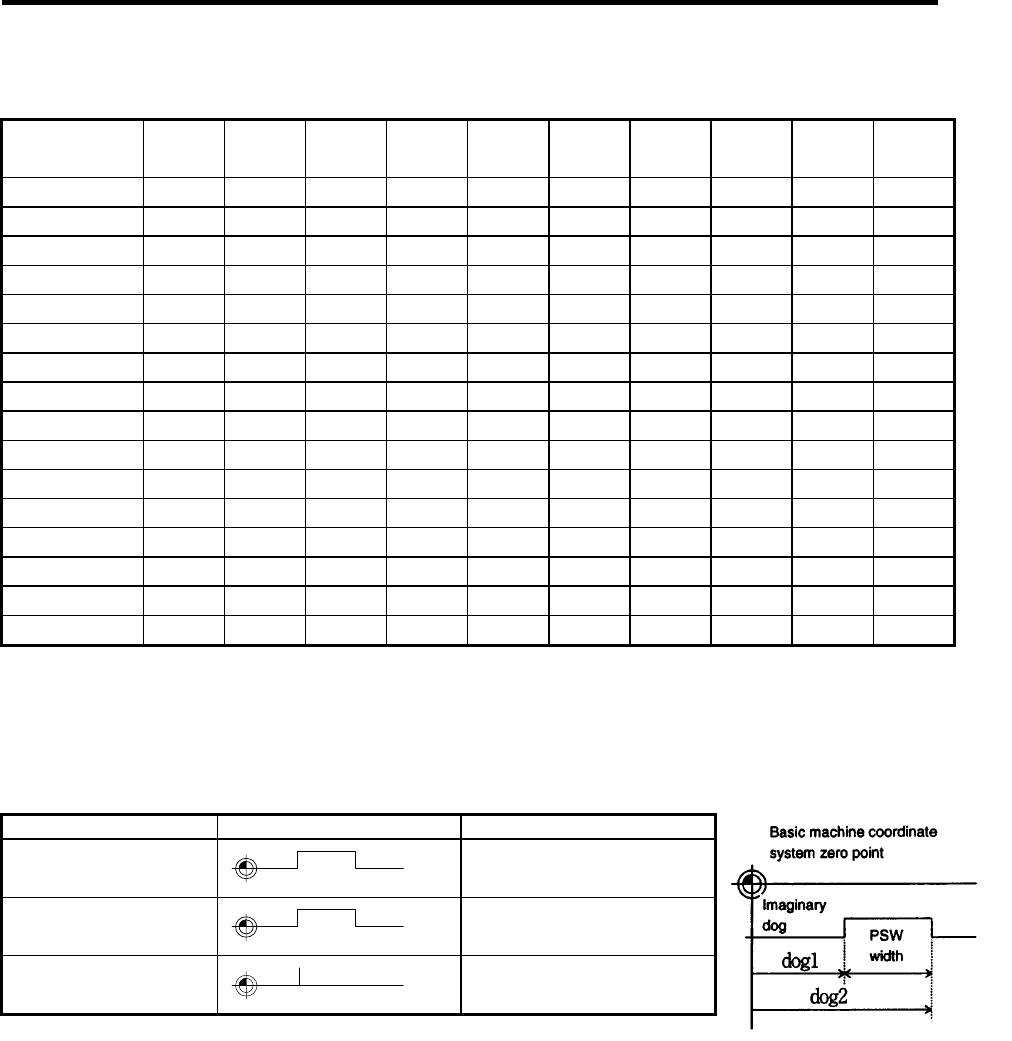
Example of settings of dog1 and dog2 and operation
Setting of dog1 and dog2 Operation Description
dog1 < dog2
dog1 dog2
A signal is output between dog1
and dog2.
dog1 > dog2
dog2 dog1
A signal is output between dog1
and dog2.
dog1 = dog2
dog1
=
dog2
If dog1 equals dog2‚ the dog1
position triggers a signal.