


















8. Spindle Parameters
8.2 MDS-B-SPJ2
191
No. Items Details
Setting
range
Standard
setting
3296
(PR)
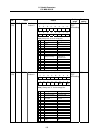
SP096 EGAR Encoder gear
ratio
Set the gear ratio between the spindle end
and the encoder end (except for the
motor-built-in encoder) as indicated below.
Setting
value
Gear ratio
(Acceleration)
–1 1 : 2
–2 1 : 4
–3 1 : 3
Setting
value
Gear ratio
(deceleration)
0 1 : 1
1 1 : 1/2
2 1 : 1/4
3 1 : 1/8
4 1 : 1/16
–3 to 4 0
3297
(PR)
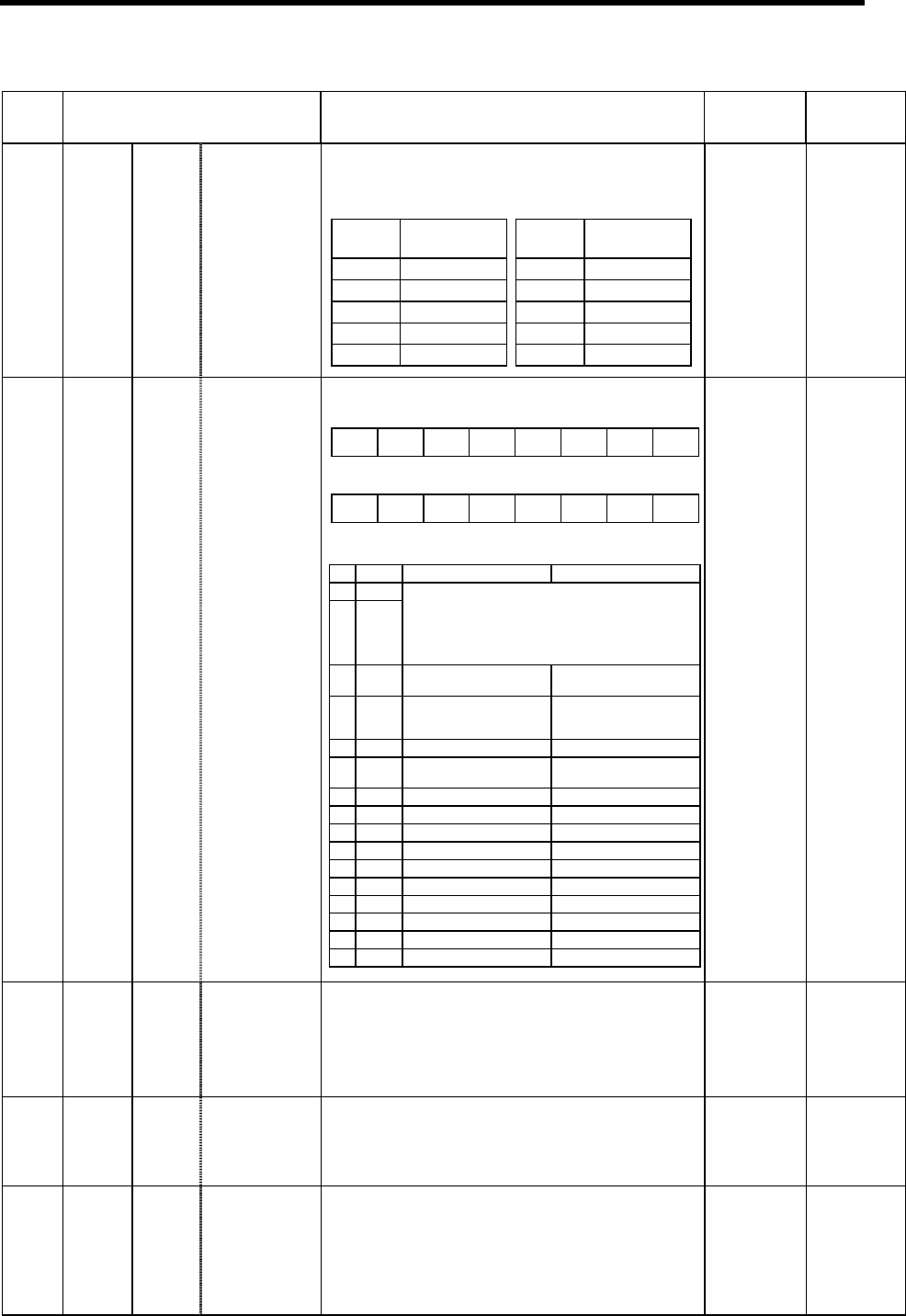
SP097 SPECO Orientation
specifica-
tion
Set the orientation specifications in bit units.
0000 to
FFFF
HEX
setting
0000
3298
(PR)
SP098 VGOP
Speed loop
gain propor-
tional term in
orientation
mode
Set the speed loop proportional gain in
orientation mode.
When the gain is increased, rigidity is
improved in the orientation stop but vibration
and sound become larger.
0 to 1000
(1/s)
3299
(PR)
SP099 VGOI
Orientation
mode speed
loop gain
integral term
Set the speed loop integral gain in orientation
mode.
0 to 1000
(0.1 1/s)
60
3300
(PR)
SP100 VGOD
Orientation
mode speed
loop gain
delay
advance
term
Set the a loop gain delay advance gain in
orientation mode.
When this parameter is set to "0", PI control is
exercised.
0 to 1000
(0.1 1/s)
15
F E D C B A 9 8
tlet
7 6 5 4 3 2 1 0
fdir pyfx dmin odi2 odi1
(Note) Always set "0" for the empty bits.
bit Name Meaning when set to 0 Meaning when set to 1
0 odi1
1
odi2
Orientation rotation direction
00: Previous (the direction in which the motor has
so far rotated under speed control)
01: Forward rotation
10: Backward rotation
11: Prohibited (Same as setting value = 10)
2
dmin Dummy in-position
invalid
Dummy in-position valid
3
pyfx Excitation min. (50%)
during orientation servo
lock invalid
Excitation min. (50%)
during orientation servo
lock valid
4
5
fdir Encoder detector
polarity: +
Encoder detector
polarity: –
6
7
8 tlet Turret indexing invalid Turret indexing valid
9
A
B
C
D
E
F