













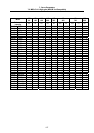

7. Servo Parameters
7.2 MDS-C1-Vx High-gain (MDS-B-Vx4 Compatible)
125
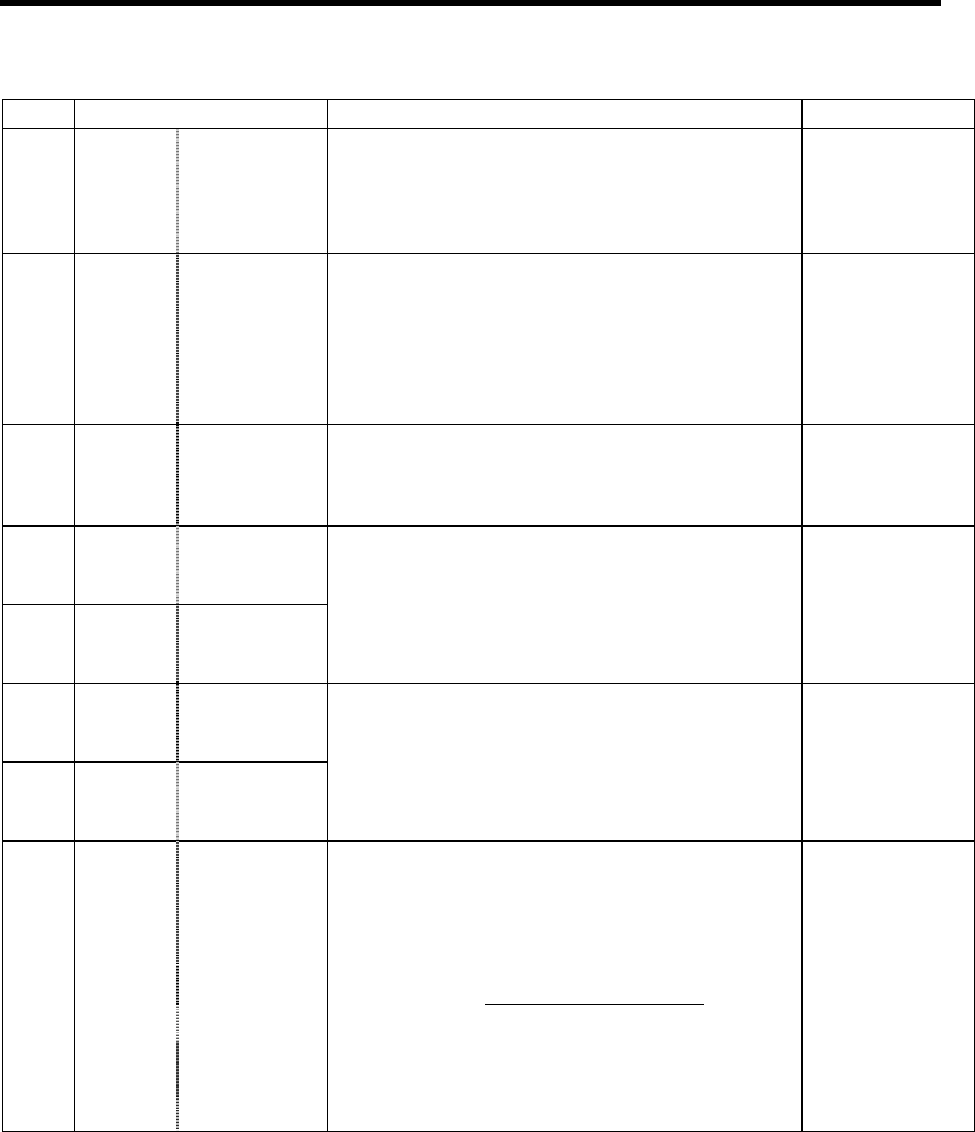
No. Items Details Setting range
2258 SV058
SHGCsp
SHG control
gain in spindle
synchronous
control
Set this with SV049 (PGN1sp) and SV050 (PGN2sp)
if you wish to perform the SHG control in the spindle
synchronous control (synchronous tapping,
synchronous control with spindle/C axis).
When not performing the SHG control, set to “0”.
0 to 1200
(rad/s)
2259 SV059
TCNV
Collision
detection
torque
estimating gain
Set the torque estimating gain when using the
collision detection function.
After setting as SV035/bitF(clt)=1 and performing
acceleration/deceleration, set the value displayed in
MPOS of the NC servo monitor screen.
Set to “0” when not using the collision detection
function.
-32768 to 32767
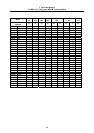
2260 SV060
TLMT
Collision
detection level
When using the collision detection function, set the
collision detection level during the G0 feeding.
If “0” is set, none of the collision detection function
will work.
0 to 999
(Stall [rated]
current %)
2261 SV061
DA1NO
D/A output
channel 1 data
No.
2262 SV062
DA2NO
D/A output
channel 2 data
No.
Input the data number you wish to output to D/A
output channel.
In the case of MDS-C1-V2, set the axis on the side to
which the data will not be output to “-1”.
-1 to 127
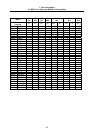
2263 SV063
DA1MPY
D/A output
channel 1
output scale
2264 SV064
DA2MPY
D/A output
channel 2
output scale
Set the scale with a 1/256 unit.
When “0” is set, output is done with the standard
output unit.
-32768 to 32767
(Unit: 1/256)
Set the spring constant of the tool end
compensation.
In the semi-closed loop control, the tool end
compensation amount is calculated with the
following equation.
F (mm/min)
2
*SV065
Compensation
amount=
R (mm)*10
9
(µm)
F: Commanded speed
R: Radius
2265 SV065
TLC
Tool end
compensation
spring constant
When not using, set to “0”.
-32768 to 32767