



















5. Base Specifications Parameters
47
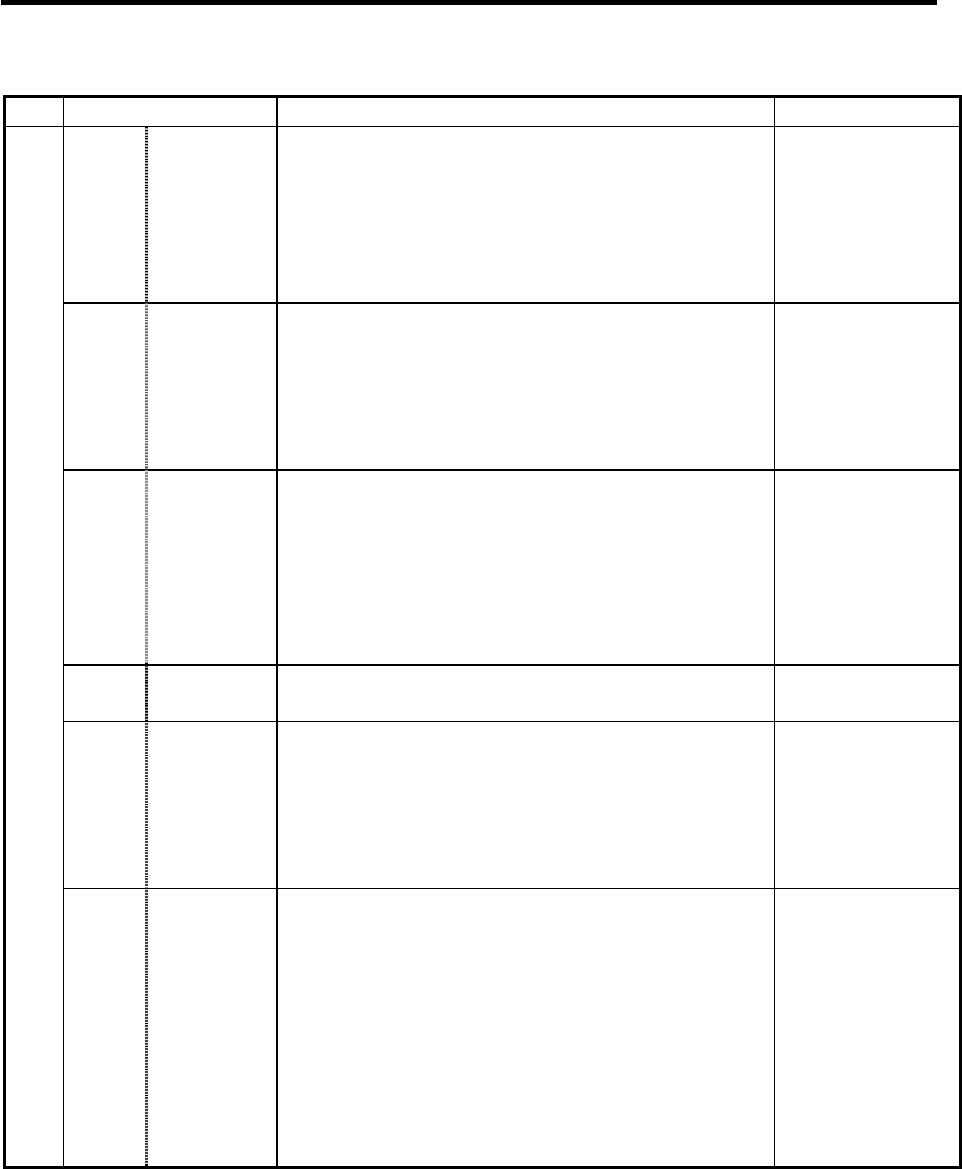
# Items Details
Setting range (unit)
1226 aux10
(bit0)
Tool compen-
sation data for
external
workpiece
coordinate
offset
measurement
Select the tool offset data to be used for external
workpiece coordinate offset measurement.
0: Tool length data and nose wear data
1: Tool length data
0/1
aux10
(bit1)
Optional
block skip
type
Specify whether to enable optional block skipping in the
middle of a block.
0: Enable block skipping only at the beginning of a
block.
1: Enable block skipping at the beginning of the
block and in the middle of a block.
0/1
aux10
(bit2)
Single block
stop timing
Specify the time at which the single block signal is
activated.
0: When the signal goes on while automatic
operation is starting, the block stops after it is
finished.
1: When the signal is on at the end of the block, the
block stops.
0/1
aux10
(bit3)
Not used. 0
aux10
(bit4)
S command
during
constant
surface
speed
Specify whether to output a strobe signal when the S
command is issued in constant surface speed mode.
0: Output no strobe signal in constant surface
speed mode.
1: Output strobe signals in constant surface speed
mode.
0/1
aux10
(bit5)
Dog/OT
signal
arbitrary
assignment
valid
Specify whether to enable the arbitrary allocation
parameter for the origin dog and H/W OT.
0: Disable arbitrary allocation. (Fixed devices are
valid.)
Note that when the backup module for
powerfailure is mounted, all dog signals
allocation will be disabled, however, OT signals
will be allocated to the fixed devices.
1: Enable arbitrary allocation. (Devices specified by
#2073 to #2075 parameters)
0/1