
















Teledyne API - Models T400 and 400E (04402F DCN6340)APPENDIX A-4: T400 and M400E Signal I/O Definitions, Revision 1.0.0/E.3
A-19
APPENDIX A-4: T400 and M400E Signal I/O Definitions, Revision 1.0.0/E.3
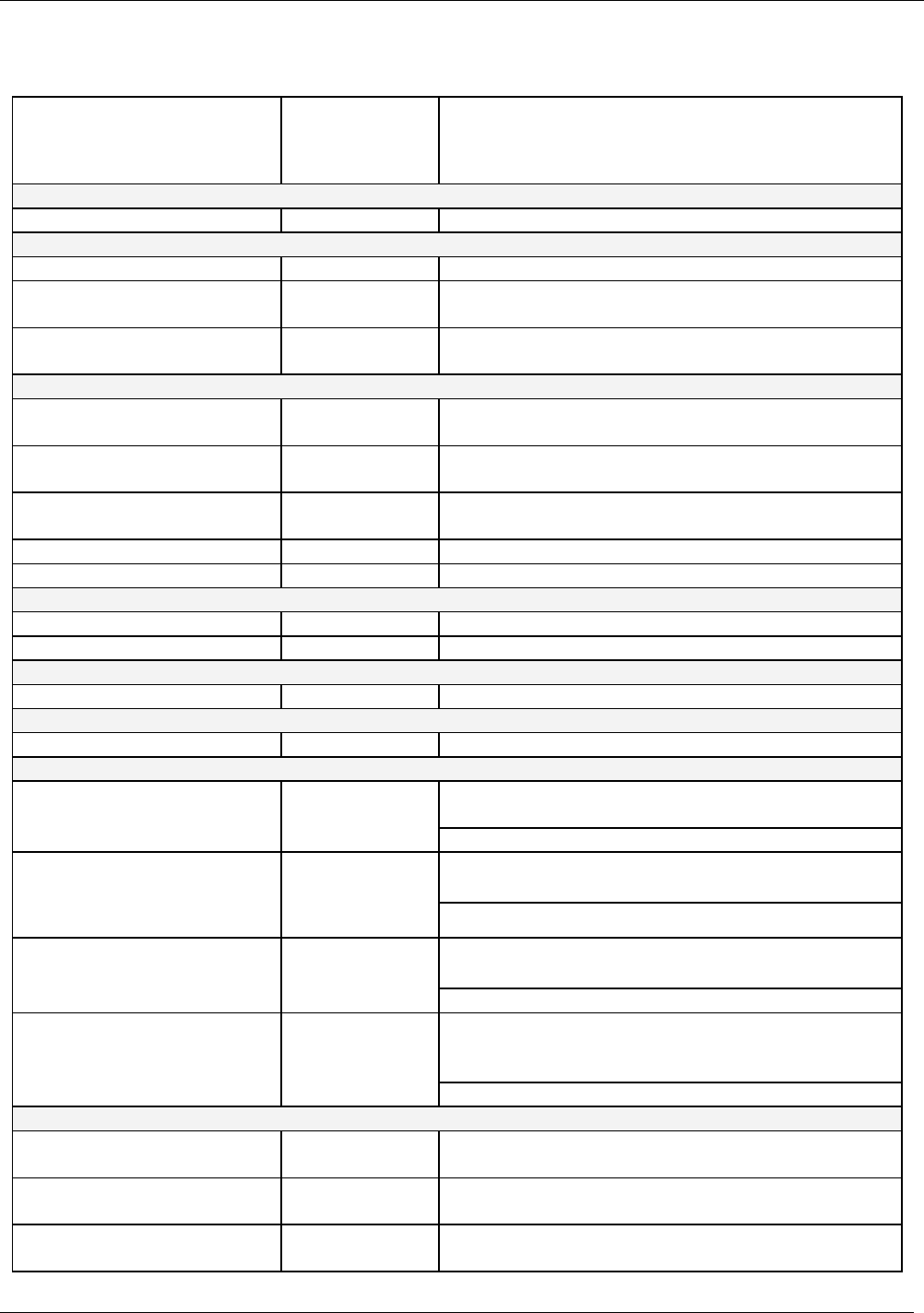
Table A-4: T400 and M400E Signal I/O Definitions, Revision 1.0.0/E.3
SIGNAL NAME
BIT OR
CHANNEL
NUMBER
DESCRIPTION
Internal inputs, U7, J108, pins 9–16 = bits 0–7, default I/O address 322 hex
0–7 Spare
Internal outputs, U8, J108, pins 1–8 = bits 0–7, default I/O address 322 hex
0–5 Spare
I2C_RESET
6
1 = reset I2C peripherals
0 = normal
I2C_DRV_RST
7
0 = hardware reset 8584 chip
1 = normal
Control inputs, U11, J1004, pins 1–6 = bits 0–5, default I/O address 321 hex
EXT_ZERO_CAL
0
0 = go into zero calibration
1 = exit zero calibration
EXT_LOW_SPAN_CAL
1
1
0 = go into low span calibration
1 = exit span calibration
EXT_SPAN_CAL
1
2
0 = go into span calibration
1 = exit span calibration
3–5 Spare
6–7 Always 1
Control inputs, U14, J1006, pins 1–6 = bits 0–5, default I/O address 325 hex
0–5 Spare
6–7 Always 1
Control outputs, U17, J1008, pins 1–8 = bits 0–7, default I/O address 321 hex
0–7 Spare
Control outputs, U21, J1008, pins 9–12 = bits 0–3, default I/O address 325 hex
0–3 Spare
Alarm outputs, U21, J1009, pins 1–12 = bits 4–7, default I/O address 325 hex
1 = system OK
0 = any alarm condition or in diagnostics mode
ST_SYSTEM_OK2,
MB_RELAY_36
3
4
Controlled by MODBUS coil register
1 = conc. limit 1 exceeded
0 = conc. OK
ST_CONC_ALARM_1
4
,
MB_RELAY_37
3
5
Controlled by MODBUS coil register
1 = conc. limit 2 exceeded
0 = conc. OK
ST_CONC_ALARM_2
4
,
MB_RELAY_38
3
6
Controlled by MODBUS coil register
1 = high auto-range in use (mirrors ST_HIGH_RANGE
status output)
0 = low auto-range
ST_HIGH_RANGE2
5
,
MB_RELAY_39
3
7
Controlled by MODBUS coil register
A status outputs, U24, J1017, pins 1–8 = bits 0–7, default I/O address 323 hex
ST_SYSTEM_OK
0
0 = system OK
1 = any alarm condition
ST_CONC_VALID
1
0 = conc. valid
1 = hold off or other conditions
ST_HIGH_RANGE
2
0 = high auto-range in use
1 = low auto-range
06870C DCN6332