
















7. Servo Parameters
7.1 MDS-B-SVJ2
93
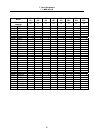
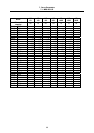
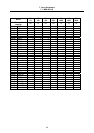
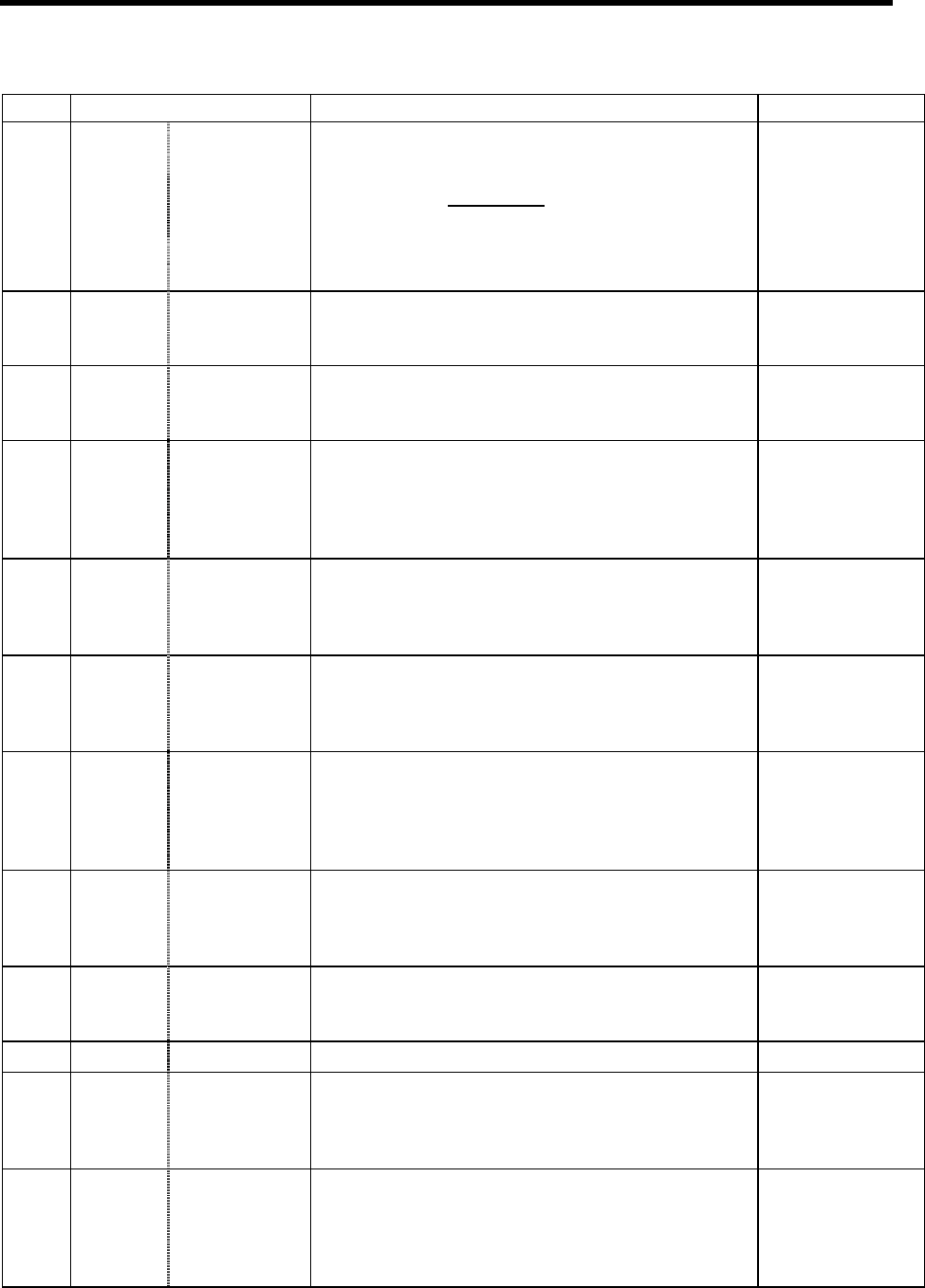
No. Items Details Setting range
Set “the motor inertia + motor axis conversion load
inertia” in respect to the motor inertia.
Jl+Jm
SV037 (JL) =
Jm
*100
Jm: Motor inertia
2237 SV037 JL Load inertia
scale
Jl: Motor axis conversion load inertia
0 to 5000
(%)
2238 SV038
FHz1
Notch filter
frequency 1
Set the vibration frequency to suppress if machine
vibration occurs.
(Valid at 72 or more) When not using, set to “0”.
0 to 3000
(Hz)
2239 SV039
LMCD
Lost motion
compensation
timing
Set this when the lost motion compensation timing
doest not match.
Adjust by increasing the value by 10 at a time.
0 to 2000
(ms)
2240 SV040
LMCT
Non-sensitive
band in feed
forward control
Set the non-sensitive bad of the lost motion
compensation and overshooting compensation
during the feed forward control.
When “0” is set, the actual value that will be set is
2µm. Adjust by increasing by 1µm.
0 to 100
(µm)
2241 SV041
LMC2
Lost motion
compensation
2
Set this with SV016 (LMC1) only when you wish to
set the lost motion compensation amount to be
different depending on the command directions.
Set to “0” as a standard.
-1 to 200
(Stall [rated]
current %)
2242 SV042
OVS2
Overshooting
compensation
2
Set this with SV031 (OVS1) only when you wish to
set the overshooting compensation amount to be
different depending on the command directions.
Set to “0” as a standard.
-1 to 100
(Stall [rated]
current %)
2243 SV043
OBS1
Disturbance
observer filter
frequency
Set the disturbance observer filter band.
The standard setting is “300”. Lower the setting by
50 at a time if vibration occurs.
To use the disturbance observer, also set SV037
(JL) and SV044 (OBS2). When not using, set to “0”.
0 to 1000
(rad/s)
2244 SV044
OBS2
Disturbance
observer gain
Set the disturbance observer gain. The standard
setting is “100” to “300”.
To use the disturbance observer, also set SV037
(JL) and SV043 (OBS1). When not using, set to “0”.
0 to 1000
(%)
2245 SV045
TRUB
Frictional
torque
Set the frictional torque when using the collision
detection function.
0 to 100
(Stall [rated]
current %)
2246 SV046 Not used. Set to “0”. 0
2247 SV047
EC
Inductive
voltage
compensation
gain
Set the inductive voltage compensation gain. Set to
“100” as a standard.
If the current FB peak exceeds the current command
peak, lower the gain.
0 to 200
(%)
2248 SV048
EMGrt
Vertical axis
drop prevention
time
Input a length of time to prevent the vertical axis from
dropping by delaying Ready OFF until the brake
works when the emergency stop occurs.
Increase the setting by 100ms at a time and set the
value where the axis does not drop.
0 to 2000
(ms)