














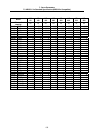

7. Servo Parameters
7.3 MDS-C1-Vx Standard Specification (MDS-B-Vx Compatible)
150
No. Items Details Setting range
2246 SV046 Not used. Set to “0”. 0
2247 SV047
EC
Inductive
voltage
compensation
gain
Set the inductive voltage compensation gain. Set to
“100” as a standard.
If the current FB peak exceeds the current command
peak, lower the gain.
0 to 200
(%)
2248 SV048
EMGrt
Vertical axis
drop prevention
time
Input a length of time to prevent the vertical axis from
dropping by delaying Ready OFF until the brake
works when the emergency stop occurs.
Increase the setting by 100ms at a time and set the
value where the axis does not drop.
0 to 20000
(ms)
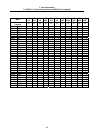
2249 SV049
PGN1sp
Position loop
gain 1 in
spindle
synchronous
control
Set the position loop gain during the spindle
synchronous control (synchronous tapping,
synchronous control with spindle/C axis).
Set the same value as the value of the spindle
parameter, position loop gain in synchronous
control.
When performing the SHG control, set this with
SV050 (PGN2sp) and SV058 (SHGCsp).
1 to 200
(rad/s)
2250 PGN2sp Position loop
gain 2 in
spindle
synchronous
control
Set this with SV049 (PGN1sp) and SV058
(SHGCsp) if you wish to perform the SHG control in
the spindle synchronous control (synchronous
tapping, synchronous control with spindle/C axis).
When not performing the SHG control, set to “0”.
0 to 999
(rad/s)
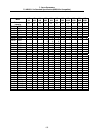
2251 SV051
DFBT
Dual feed back
control time
constant
Set the control time constant in dual feed back.
When “0” is set, the actual value that is set is 1ms.
The higher the time constant is, the closer it gets to
the semi-closed control, so the limit of the position
loop gain is raised.
0 to 9999
(ms)
2252 SV052
DFBN
Dual feedback
control
non-sensitive
band
Set the non-sensitive band in the dual feedback
control.
Set to “0” as a standard.
0 to 9999
(µm)
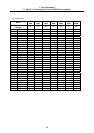
2253 SV053
OD3
Excessive error
detection width
in special
control
Set the excessive error detection width when servo
ON in a special control (initial absolute position
setting, stopper control, etc.).
If “0” is set, excessive error detection won’t be
performed when servo ON during a special control.
0 to 32767
(mm)
2254 SV054
ORE
Overrun
detection width
in closed loop
control
Set the overrun detection width in the full-closed loop
control.
If the gap between the motor end detector and the
linear scale (machine end detector) exceeds the
value set by this parameter, it is judged to be overrun
and Alarm 43 will be detected.
When “-1” is set, the alarm detection won’t be
performed. When “0” is set, overrun is detected with
a 2mm width.
-1 to 32767
(mm)