

















8. Spindle Parameters
8.3 MDS-B-SP/SPH, MDS-C1-SP/SPH
202
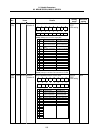
No. Items Details
Setting
range
Standard
setting
3207 SP007 OPST In-position
shift
amount for
orientation
Set the stop position for orientation.
(i)Motor built-in encoder, encoder:
Set the value by dividing 360° by 4096.
(ii)Magnetic sensor:
Divide –5° to +5° by 1024 and put 0° for 0.
(i) 0 to 4095
(ii) –512 to
512
0
3208
SP008 Not used. Set to "0". 0 0
3209 SP009 PGT Synchroni-
zed
tapping
Position
loop gain
Set the spindle position loop gain in
synchronized tapping mode.
1 to 100
(1/s)
15
3210 SP010 PGS Spindle
synchro-
nous
position
loop gain
Set the spindle position loop gain in spindle
synchronization mode.
1 to 100
(1/s)
15
3211
to
3216
SP011
to
SP016
Use not possible. 0 0
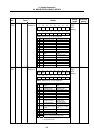
3217
(PR)
SP017 TSP Maximum
motor
speed
Set the maximum motor speed of the spindle. 1 to 32767
(r/min)
6000
3218
(PR)
SP018 ZSP Motor zero
speed
Set the motor speed for which zero-speed
output is performed.
1 to 1000
(r/min)
50
3219
(PR)
SP019 CSN1 Speed
cushion 1
Set the time constant for a speed command from
"0" to the maximum speed.
(This parameter is invalid in position loop mode.)
1 to 32767
(10ms)
30
3220
(PR)
SP020 SDTS Speed
detection
set value
Set the motor speed so for which speed
detection output is performed.
Usually, the setting value is 10% of SP017
(TSP).
0 to 32767
(r/min)
600
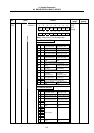
3221 SP021 TLM1 Torque
limit 1
Set the torque limit rate for torque limit signal
001.
0 to 120 (%) 10
3222
(PR)
SP022 VGNP1 Speed
loop gain
propor-
tional term
under
speed
control
Set the speed loop proportional gain in speed
control mode.
When the gain is increased, response is
improved but vibration and sound become
larger.
0 to 1000
(1/s)
63
3223
(PR)
SP023 VGNI1 Speed
loop gain
integral
term under
speed
control
Set the speed loop integral gain in speed control
mode.
Usually, set a value in proportion to SP022
(VGNP1).
0 to 1000
(0.1 1/s)
60