














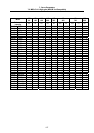
7. Servo Parameters
7.2 MDS-C1-Vx High-gain (MDS-B-Vx4 Compatible)
124
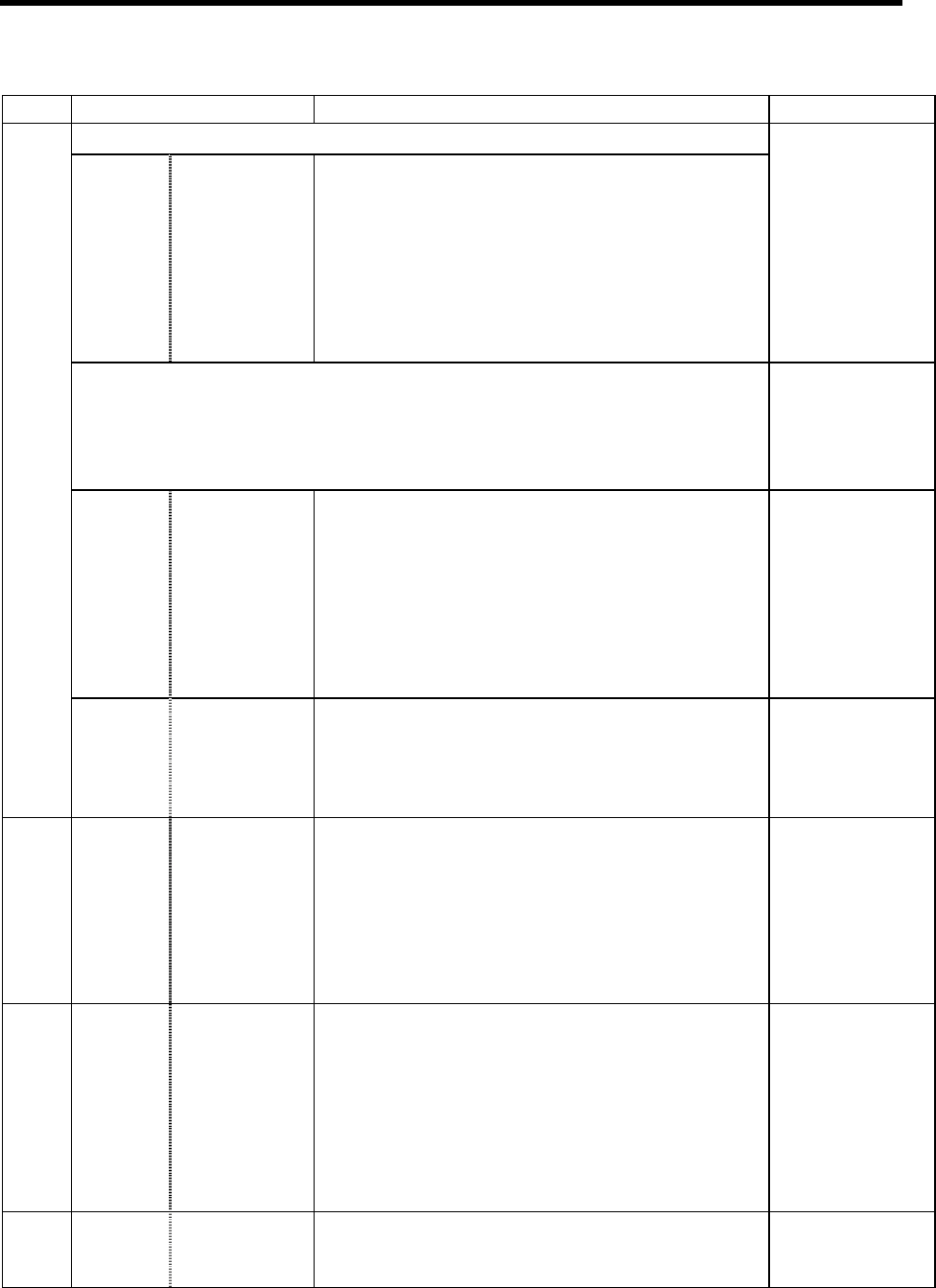
No. Items Details Setting range
When SV035 (SSF4)/ bitF (ckab)=0
SV054
ORE
Overrun
detection width
in closed loop
control
Set the overrun detection width in the full-closed loop
control.
If the gap between the motor end detector and the
linear scale (machine end detector) exceeds the
value set by this parameter, it is judged to be overrun
and Alarm 43 will be detected.
When “-1” is set, the alarm detection won’t be
performed. When “0” is set, overrun is detected with
a 2mm width.
-1 to 32767 (mm)
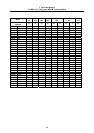
When SV035 (SSF4)/ bitF (ckab)=1
(Note) This applies to only MDS-C1-Vx.
The higher order 8bits and lower order 8bits are used for different
functions.
“Setting value of SV054” =(NSE*256)+ORE
0 to 32767
SV054
ORE
(Low
order)
Overrun
detection-
width in closed
loop control
Set the overrun detection width in the full-closed loop
control.
If the gap between the motor end detector and the
linear scale (machine end detector) exceeds the
value set by this parameter, it is judged to be overrun
and Alarm 43 will be detected.
When “255” is set, the alarm detection won’t be
performed. When “0” is set, overrun is detected with
a 2mm width.
0 to 255
(mm)
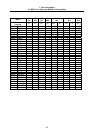
2254
SV054
NSE
(High
order)
Special
detection width
for No signal 2
When SV035 (SSF4)/ bitF (ckab) =1, this setting is
valid. Set the special detection width for No signal 2
(Alarm 21).
When “0” is set, overrun is detected with a 15µm
width.
0 to 127
(µm)
2255 SV055
EMGx
Max. gate off
delay time after
emergency
stop
Set a length of time from the point when the
emergency stop is input to the point when READY
OFF is compulsorily executed.
Normally, set the same value as the absolute value
of SV056.
In preventing the vertical axis from dropping, the gate
off is delayed for the length of time set by SV048 if
SV055’s value is smaller than that of SV048.
0 to 20000
(ms)
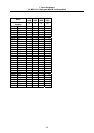
2256 SV056
EMGt
Deceleration
time constant
at emergency
stop
In the vertical axis drop prevention time control, set
the time constant used for the deceleration control at
emergency stop. Set a length of time that takes from
rapid traverse rate (rapid) to stopping.
Normally, set the same value as the rapid traverse
acceleration/deceleration time constant.
When executing the synchronous operation, put the
minus sign to the settings of both of the master axis
and slave axis.
-20000 to 20000
(ms)
2257 SV057
SHGC
SHG control
gain
When performing the SHG control, set this with S003
(PGN1) and SV004 (PGN2).
When not performing the SHG control, set to “0”.
0 to 1200
(rad/s)