


















16. Auxiliary Axis Parameters
293
No. Name Details Setting range
Default
value
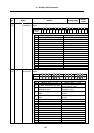
14 NCH Notch filter No. Set the frequency of the machine resonance suppression filter.
Do not set values without a description.
Setting
value
0 1 2 3 4 5 6 7
Frequency
(Hz)
No
start
1125 563 375 282 225 188 161
15
(Not used.) 0
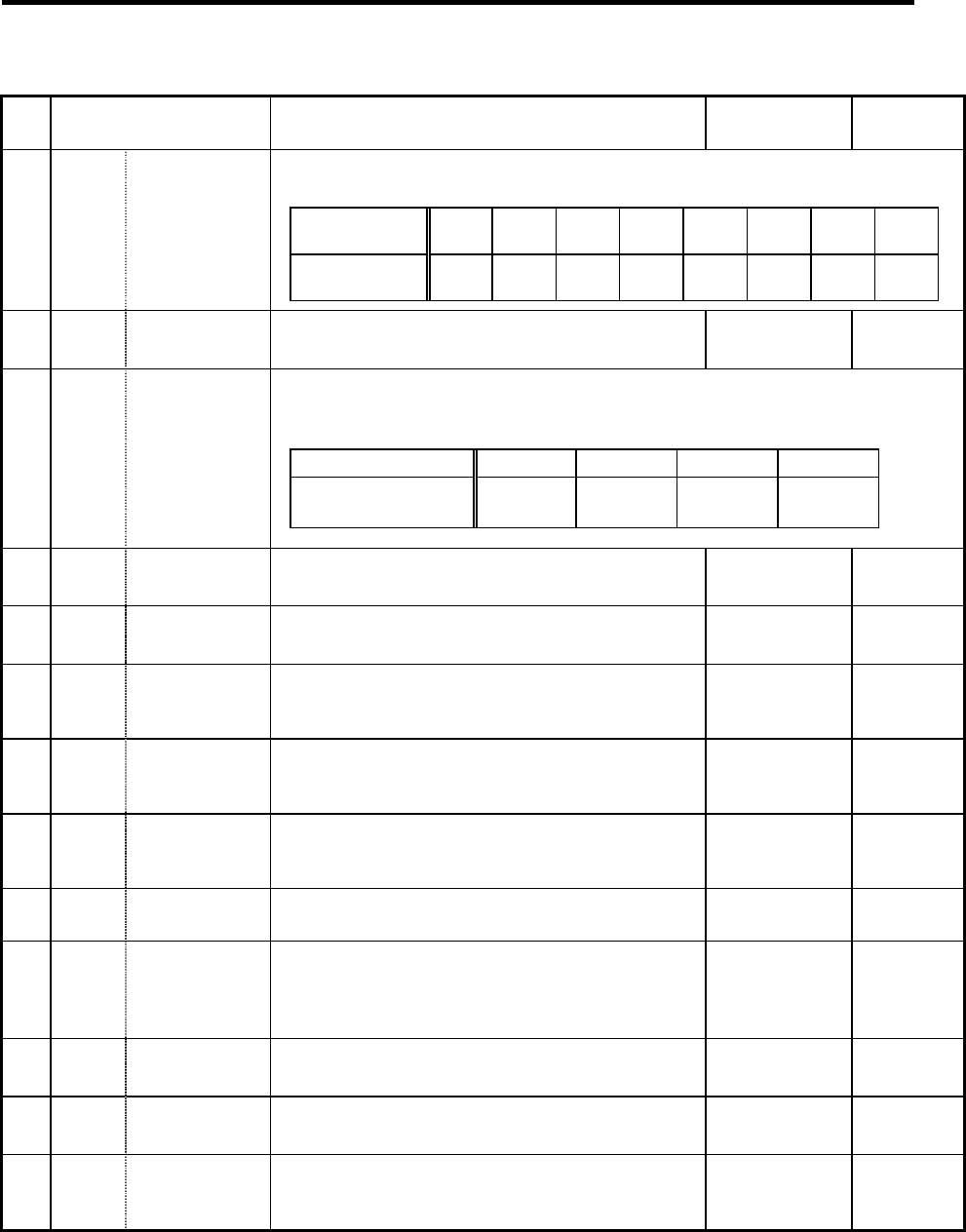
16 JIT Jitter
compensation
Set the No. of ignored jitter compensation pulses. Do not set values without a
description.
Setting value 0 1 2 3
Number of ignore
pulses
No start 1 2 3
17
(Not used.) 0
18
(Not used.) 0
19 PG2 Position loop
gain 2
Set the position loop gain of the actual loop.
Determine the position responsiveness for
external disturbance.
1 to 500 (1/s) 25
20 VG1 Speed loop
gain 1
Set the speed loop gain of the model loop.
Determine the tracking ability regarding the
speed commands.
20 to 5000 (1/s) 1200
21 VG2 Speed loop
gain 2
Set the speed loop gain of the actual loop.
Determine the speed responsiveness for external
disturbance.
20 to 8000 (1/s) 600
22 VIC Speed integral
compensation
Determine the characteristics of the speed
low-frequency region.
1 to 1000 (ms) 20
23 VDC Speed
differential
compensation
PI control normally results from a default value of
1000.
Adjust the overshoot amount by lowering in
increments of 20.
0 to 1000 1000
24
DG2 Load inertia
ratio
Set the load inertia ratio for the motor inertia. 0.0 to 50.0
(fold)
2.0
25
(Not used.) 0
30
(PR)
MTY Motor type Set the motor type. This is automatically judged
by the system when the default value (0000) is
set.
0000 to FFFF
(hexadecimal)
0000