















7. Servo Parameters
7.2 MDS-C1-Vx High-gain (MDS-B-Vx4 Compatible)
109
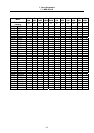
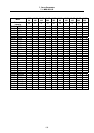
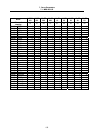
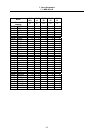
No. Items Details Setting range
Set this when the limit cycle occurs in the full-closed
loop, or overshooting occurs in positioning.
Select the control method with SV027 (SSF1)/bit1, 0
(vcnt).
Normally, use “Changeover type 2”.
When you set this parameter, make sure to set the
torque offset (SV032 (TOF)). When not using, set to
“0”.
No changeover
When SV027 (SSF1)/ bit1, 0 (vcnt)=00
The delay compensation control is always valid.
Changeover type 1
When SV027 (SSF1)/ bit1, 0 (vcnt)=01
The delay compensation control works when the
command from the NC is “0”.
Overshooting that occurs during pulse feeding can be
suppressed.
2207 SV007
VIL
Speed loop
delay
compensation
Changeover type 2
When SV027 (SSF1)/ bit1, 0 (vcnt)=10
The delay compensation control works when the
command from the NC is “0” and the position droop is
“0”. Overshooting or the limit cycle that occurs during
pulse feeding or positioning can be suppressed.
0 to 32767
2208 SV008
VIA
Speed loop
lead
compensation
Set the gain of the speed loop integration control.
The standard setting is “1364”. During the SHG
control, the standard setting is “1900”. Adjust the
value by increasing/decreasing it by about 100 at a
time.
Raise this value to improve contour tracking precision
in high-speed cutting. Lower this value when the
position droop vibrates (10 to 20Hz).
1 to 9999
2209 SV009
IQA
Current loop q
axis lead
compensation
2210 SV010
IDA
Current loop d
axis lead
compensation
1 to 20480
2211 SV011
IQG
Current loop q
axis gain
2212 SV012
IDG
Current loop d
axis gain
Set the gain of current loop.
As this setting is determined by the motor’s electrical
characteristics, the setting is fixed for each type of
motor.
Set the standard values for all the parameters
depending on each motor type.
1 to 4096
(In case of
MDS-B-Vx4,
1 to 8192)
2213 SV013
ILMT
Current limit
value
Set the normal current (torque) limit value. (Limit
values for both + and - direction.)
When the value is “500” (a standard setting), the
maximum torque is determined by the specification of
the motor.
0 to 999
(Stall [rated]
current %)
2214 SV014
ILMTsp
Current limit
value in special
control
Set the current (torque) limit value in a special control
(initial absolute position setting, stopper control, etc).
(Limit values for both of the + and - directions.)
Set to “500” when not using.
0 to 999
(Stall [rated]
current %)