



















Section 1
General Information
Receiving & Installation 3-17MN722
Home (Orient) Switch Input The Home or Orient function is active in the Bipolar and Serial modes and causes the
motor shaft to rotate to a predefined home position. The homing function allows shaft
rotation in the drive forward direction only. The home position is located when a machine
mounted switch or the encoder “Index” pulse is activated (closed). Home is defined by a
rising signal edge at terminal J1-27. The shaft will continue to rotate only in a “Drive
Forward” direction for a user defined offset value. The offset is programmed in the Level
2 Miscellaneous Homing Offset parameter. The speed at which the motor will “Home” or
orient is set with the Level 2 Miscellaneous Homing Speed parameter.
A machine mounted switch may be used to define the Home position in place of the
encoder index channel. A differential line driver output from a solid state switch is
preferred for best noise immunity. Connect this differential output to terminals J1-27 and
J1-28.
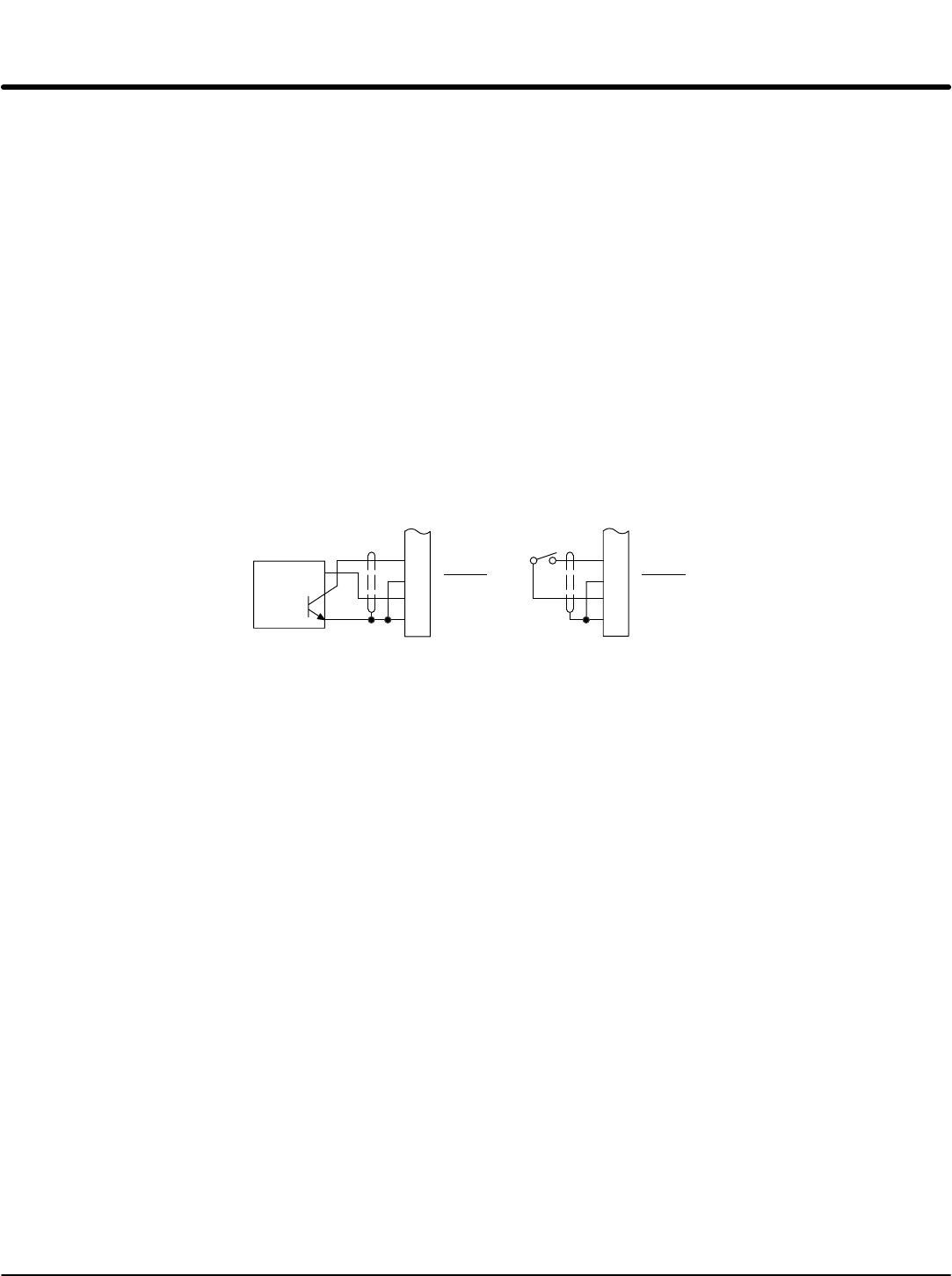
A single ended solid-state switch or limit switch should be wired as shown in Figure 3-9.
Regardless of the type of switch used, clean rising and falling edges at J1-27 are required
for accurate positioning.
Note: A control may require dynamic brake hardware for Orient (Homing) function to
work. The control may trip without dynamic brake hardware installed.
Figure 3-9 Typical Home or Orient Switch Connections
27
28
29
30
Common
+5V
INDEX
INDEX
J1
27
28
29
30
Common
+5V
INDEX
INDEX
J1
Limit Switch (Closed at HOME).5VDC Proximity Switch
+5V Input
Output
Common
See recommended terminal tightening torques in Section 7.
Example:
If the drive is operating in the forward direction when the “Orient” J1-11 input is closed,
the drive will decel at “DECEL #1” speed. Then continue in the forward direction at the
“Homing Speed” until the index pulse is received. The drive will continue past the int
index in the forward direction by the amount of the “Homing Offset”. The drive will then
stop and maintain position.