



















7. Servo Parameters
7.1 MDS-B-SVJ2
88
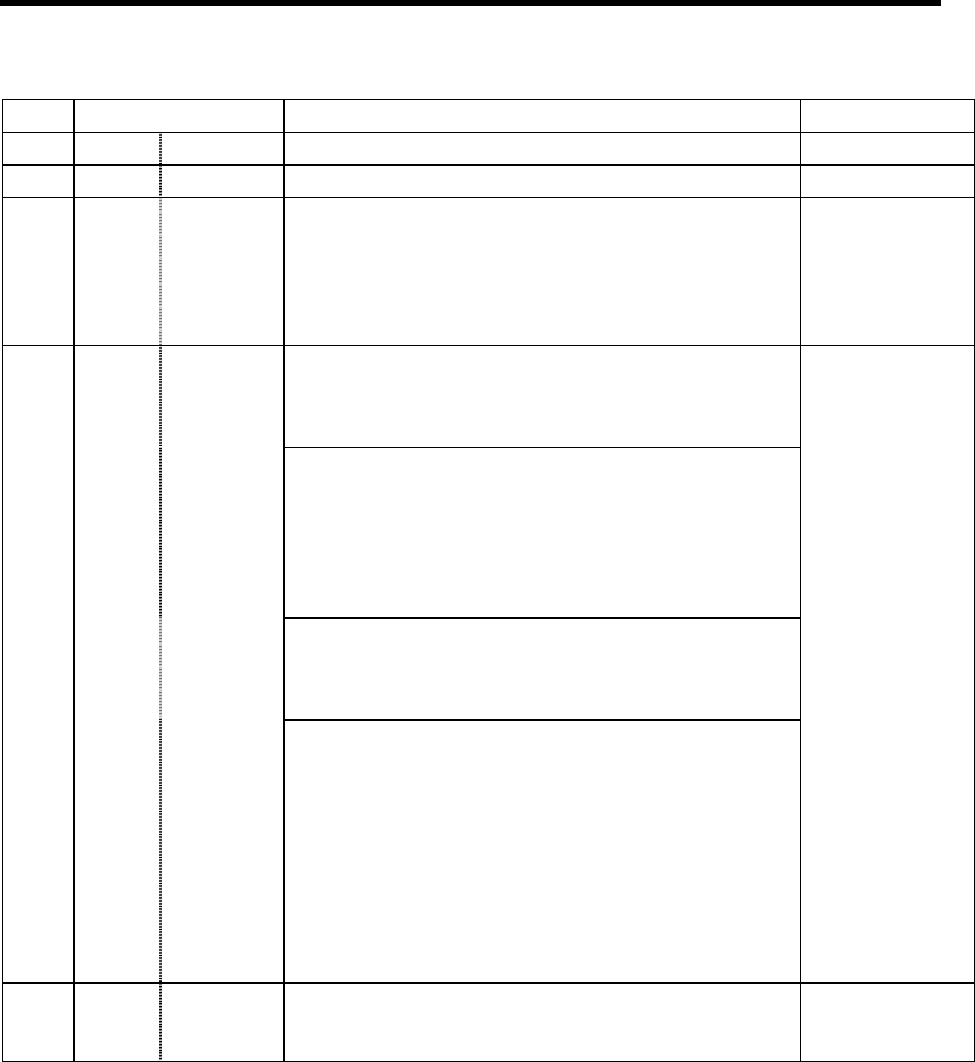
No. Items Details Setting range
2228 SV028 Not used. Set to “0”. 0
2229 SV029 Not used. Set to “0”. 0
2230 SV030
IVC
Voltage
dead time
compensa-
tion
When 100% is set, the voltage equivalent to the logical
non-energized time will be compensated.
Adjust in increments of 10% from the default value 100%.
If increased too much, vibration or vibration noise may be
generated.
When not using, set to “0”.
0 to 200
(%)
Set this if overshooting occurs during positioning. This
compensates the motor torque during positioning.
This is valid only when the overshooting compensation
SV027 (SSF1/ovs) is selected.
Type 1: When SV027 (SSF1)/ bit11, 10 (ovs)=01
Set the compensation amount based on the motor’s stall
(rated) current.
Increase by 1% and determine the amount that
overshooting doesn’t occur.
In Type 1, compensation during the feed forward control
during circular cutting won’t be performed.
Type 2: When SV027 (SSF1)/ bit11, 10 (ovs)=10
Use this if you perform the overshooting compensation
during the feed forward control during circular cutting.
The setting method is the same in Type 1.
2231 SV031
OVS1
Overshoot-
ing
compensa-
tion 1
When you wish different compensation amount
depending on the direction
When SV042 (OVS2) is “0”, compensate with the value of
SV031 (OVS1) in both of the + and -directions.
If you wish to change the compensation amount
depending on the command direction, set this and SV042
(OVS2). (SV031: + direction, SV042: - direction.
However, the directions may be opposite depending on
other settings.)
When “-1” is set, the compensation won’t be performed in
the direction of the command.
-1 to 100
(Stall [rated]
current %)
2232 SV032
TOF
Torque
offset
Set the unbalance torque of vertical axis and inclined
axis.
-100 to 100
(Stall [rated]
current %)