



















8. Spindle Parameters
8.2 MDS-B-SPJ2
196
No. Items Details
Setting
range
Standard
setting
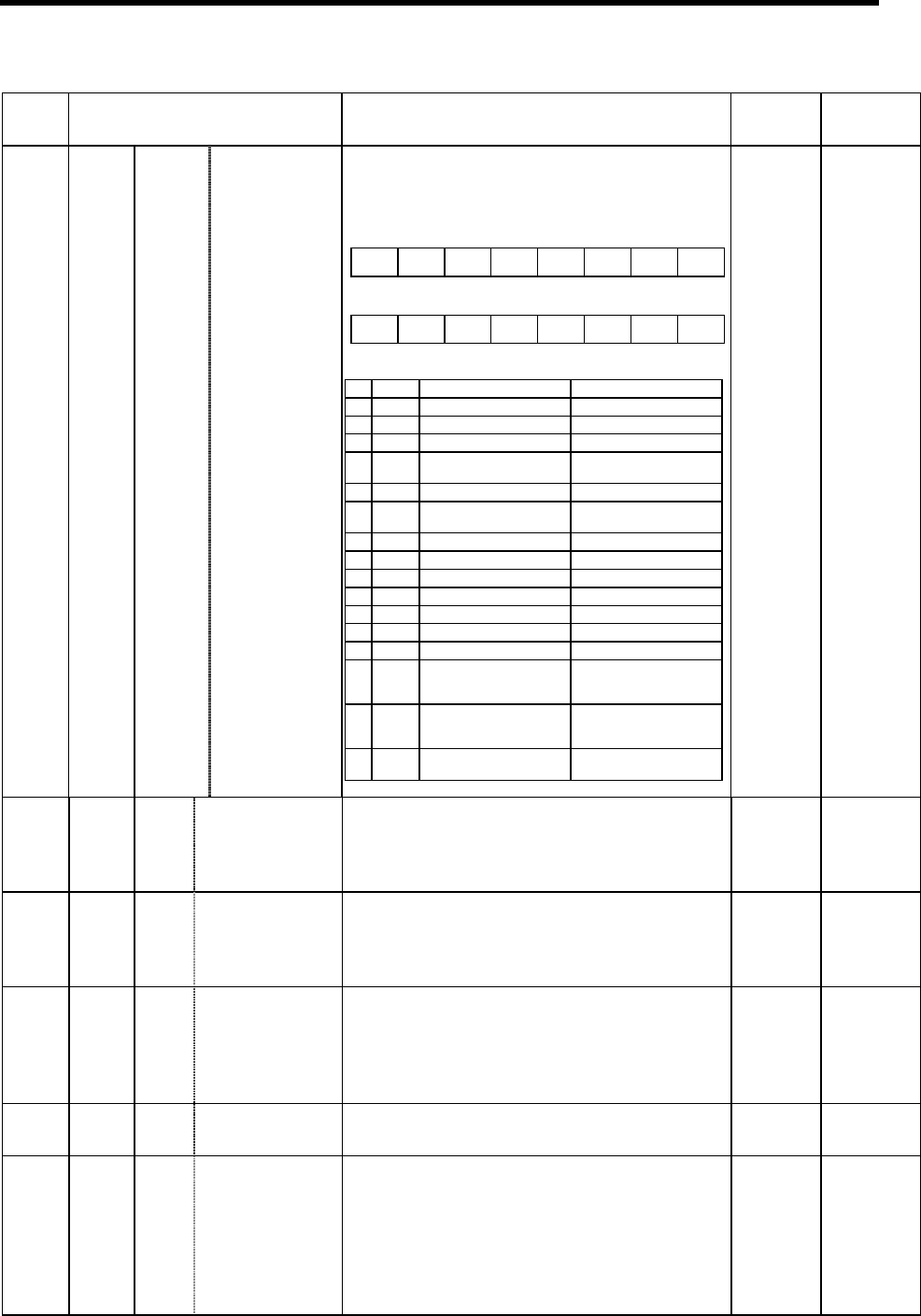
3393
(PR)
SP193 SPECT Synchronous
tapping
specifications
Set the synchronous tapping specifications in
bit units.
0000 to
FFFF
HEX
setting
0000
3394
(PR)
SP194 VGTP Synchronous
tapping speed
loop gain propor-
tional term
Set the speed loop proportional gain in
synchronous tapping mode.
0 to 1000
(1/s)
63
3395
(PR)
SP195 VGTI Synchronous
tapping speed
loop gain integral
term
Set the speed loop integral gain in
synchronous tapping mode.
0 to1000
(0.1 1/s)
60
3396
(PR)
SP196 VGTD Synchronous
tapping speed
loop gain delay
advance
term
Set the speed loop delay advance gain in
synchronous tapping mode.
When this parameter is set to "0", PI control is
exercised.
0 to1000
(0.1 1/s)
15
3397
SP197 Not used. Set to "0". 0 0
3398
(PR)
SP198 VCGT Target value of
variable speed
loop
proportional
gain at
synchronous
tapping
Set the magnification of speed loop
proportional gain with respect to SP194
(VGTP) at the maximum motor speed defined
in SP017 (TSP) at synchronous tapping.
0 to 100
(%)
100
F E D C B A 9 8
zrtn ptyp od8x
7 6 5 4 3 2 1 0
fdir cdir pyfx fclx
(Note) Always set "0" for the empty bits.
bit Name Meaning when set to 0 Meaning when set to 1
0 fclx Closed loop Semi-closed loop
1
2
3
pyfx Normal excitation Position loop excitation
fixed (strong)
4 cdir Command polarity (+) Command polarity (–)
5
fdir Position detector
polarity (+)
Position detector
polarity (–)
6
7
8
9
A
B
C
D
od8x Magnification of
excessive error width ×
8 times invalid
Magnification of
excessive error width ×
8 times valid
E
ptyp Position control switch
type: After zero point
return
Position control switch
type: After deceleration
stop
F
zrtn Zero point return
direction: CCW
Zero point return
direction: CW