

















8. Spindle Parameters
8.3 MDS-B-SP/SPH, MDS-C1-SP/SPH
201
8.3 MDS-B-SP/SPH, MDS-C1-SP/SPH
The spindle parameter setting and display method will differ according to the NC being used, so refer to
Instruction Manual for each NC and the following spindles.
MELDAS AC Servo and Spindle MDS-A Series MDS-B Series Specifications Manual .BNP-B3759
MELDAS AC Servo and Spindle MDS-C1 Series Specifications Manual ......................BNP-C3000
For parameters marked with a (PR) in the tables, turn the NC power OFF after setting. The parameters
will be valid after the power is turned ON again.
The "fixed control constants" and "fixed control bits" in this section are set by Mitsubishi.
!
CAUTION
!
Do not make remarkable adjustments or changes of the parameters as the operation may
become unstable.
!
In the explanation on bits, set all bits not used, including blank bits, to “0”.
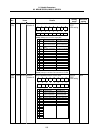
No. Items
Details
Setting
range
Standard
setting
3201 SP001 PGM Magnetic
sensor and
motor
built-in
encoder
orientation
position
loop gain
As the set value is larger, the orientation time
becomes shorter and servo rigidity is increased.
However, vibration is increased and the machine
becomes likely to overshoot.
0 to 1000
(0.1 1/s)
100
3202 SP002 PGE Encoder
orientation
position
loop gain
As the set value is larger, the orientation time
becomes shorter and servo rigidity is increased.
However, vibration is increased and the machine
becomes likely to overshoot.
0 to 1000
(0.1 1/s)
100
3203 SP003 PGC0 C-axis
non-cutting
position
loop gain
Set the position loop gain in C-axis non-cutting
mode.
During non-cutting (rapid traverse, etc.) with the
C axis control, this position loop gain setting is
valid.
1 to 100
(1/s)
15
3204 SP004 OINP Orientation
in-position
width
Set the position error range in which an
orientation completion signal is output.
1 to 2880
(1/16 °)
16
3205
(PR)
SP005 OSP Orientation
mode
changing
speed limit
value
Set the motor speed limit value to be used when
the speed loop is changed to the position loop in
orientation mode.
When this parameter is set to "0", SP017 (TSP)
becomes the limit value.
0 to 32767
(r/min)
0
3206 SP006 CSP Orientation
mode
deceleration
rate
As the set value is larger, the orientation time
becomes shorter. However, the machine
becomes likely to overshoot.
1 to 1000 20