



















6.2.3 Overview of operating modes
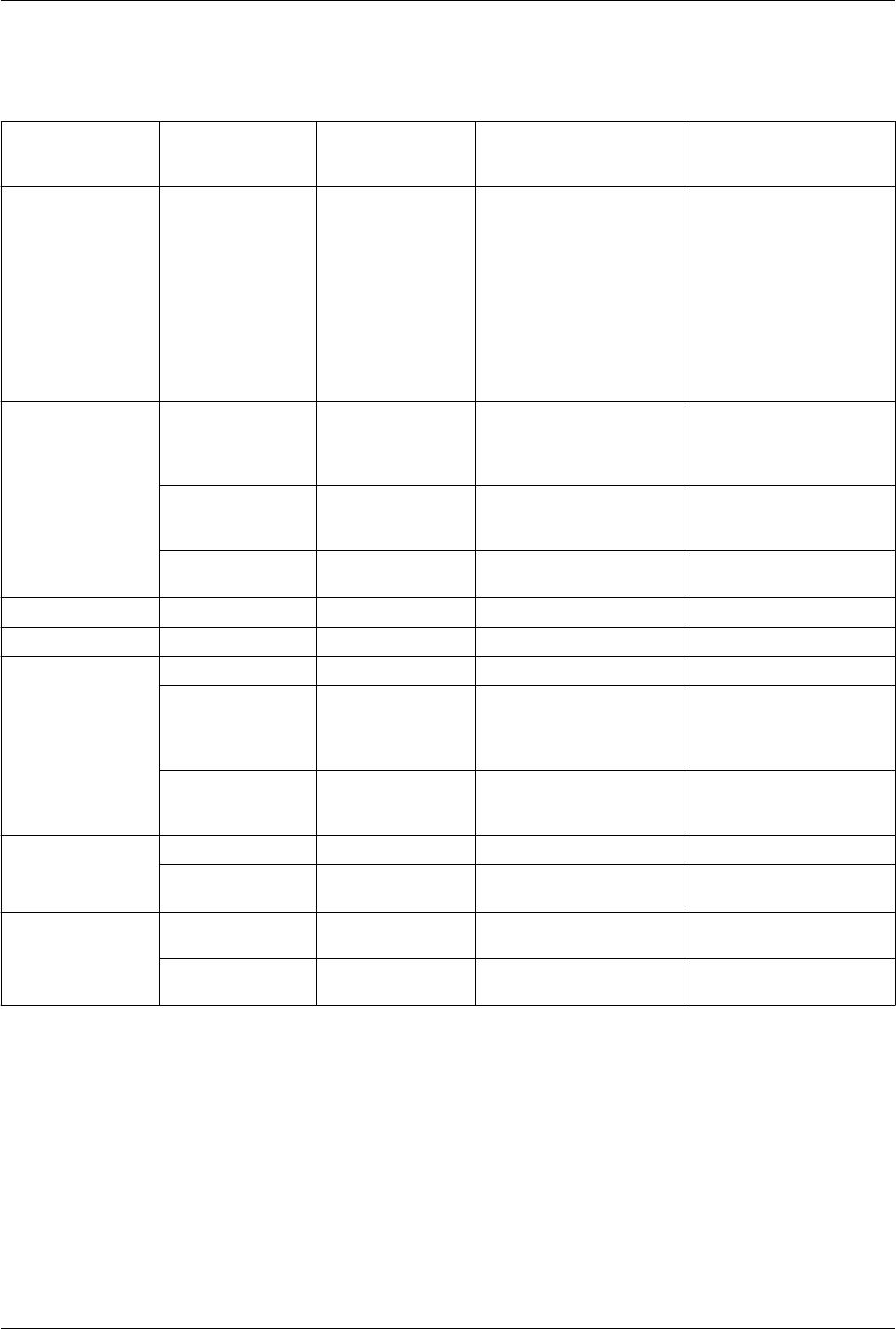
The table below provides an overview of the operating modes.
Detailed information can be found on the following pages.
Operating mode Method dmControl
Bits 0 ... 6
MODE+ACTION
Reference value RefA32 Reference value RefB32
Jog 1F
h
Value 0: No movement
Value 1: Slow movement
in positive direction
Value 2: Slow movement
in negative direction
Value 5: Fast movement in
positive direction
Value 6: Fast movement in
negative direction
-
Electronic Gear Position synchroni-
zation without com-
pensation move-
ment
1E
h
As GEARdenom As GEARnum
Position synchroni-
zation with compen-
sation movement
3E
h
As GEARdenom As GEARnum
Velocity synchroni-
zation
5E
h
As GEARdenom As GEARnum
Profile Torque 24
h
As PTtq_target As RAMP_tq_slope
Profile Velocity 23
h
As PVv_target -
Profile Position Absolute 01
h
As PPv_target As PPp_target
Relative with refer-
ence to the cur-
rently set target
position
21
h
As PPv_target As PPp_target
Relative with refer-
ence to the current
motor position
41
h
As PPv_target As PPp_target
Homing Position setting 06
h
- As HMp_setP
Reference move-
ment
26
h
As HMmethod -
Motion Sequence Start sequence 1D
h
Data set number Value 1: Use data set
number
Start individual data
set
3D
h
Data set number -
6 Operation
LXM32M
56
Modbus-TCP module
0198441113843, V1.01, 01.2012