



















42 SPAN-IGM User Manual Rev 2
Chapter 5 Reference Frames Within SPAN
The reference frames that are most frequently used throughout this manual are the following:
• the Local-Level Frame
• the SPAN Body Frame
• the Enclosure Frame
• the Vehicle Frame
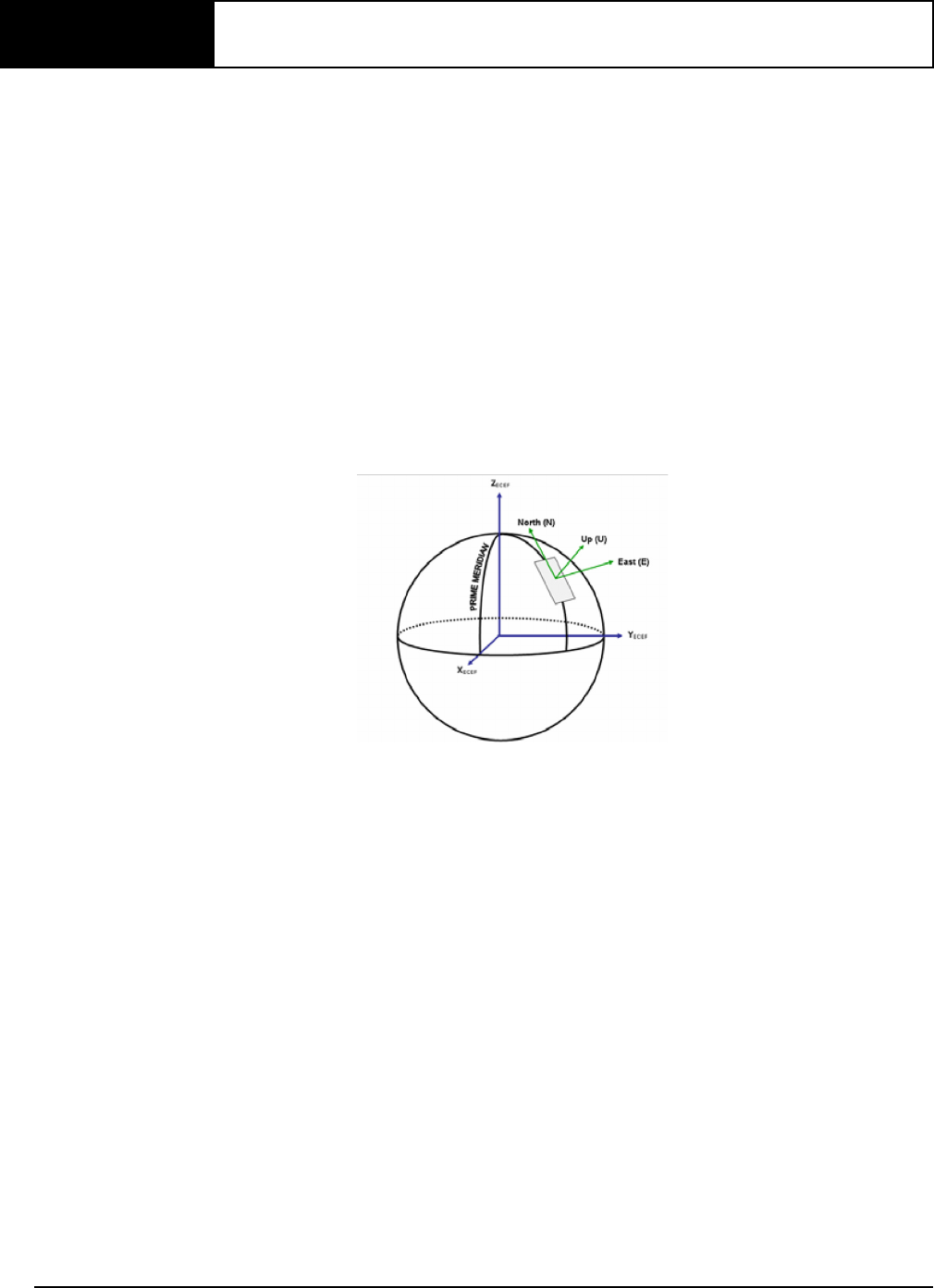
5.1 The Local-Level Frame (ENU)
The definition of the local level coordinate frame is as follows:
• z-axis – pointing up (aligned with gravity)
• y-axis – pointing north
• x-axis – pointing east
Figure 9: Local-Level Frame (ENU)
5.2 The SPAN Body Frame
The definition of the SPAN body frame is as follows:
• z-axis – pointing up (aligned with gravity)
• y-axis – defined by how the IMU is mounted
• x-axis – defined by how the IMU is mounted
To determine your SPAN x-axis and y-axis, see Table 7, Full Mapping Definitions on page 43. This frame
is also known as the computation frame and is the frame where all the mechanization equations are
computed.