



















36 SPAN-IGM User Manual Rev 2
Chapter 3 SPAN Operation
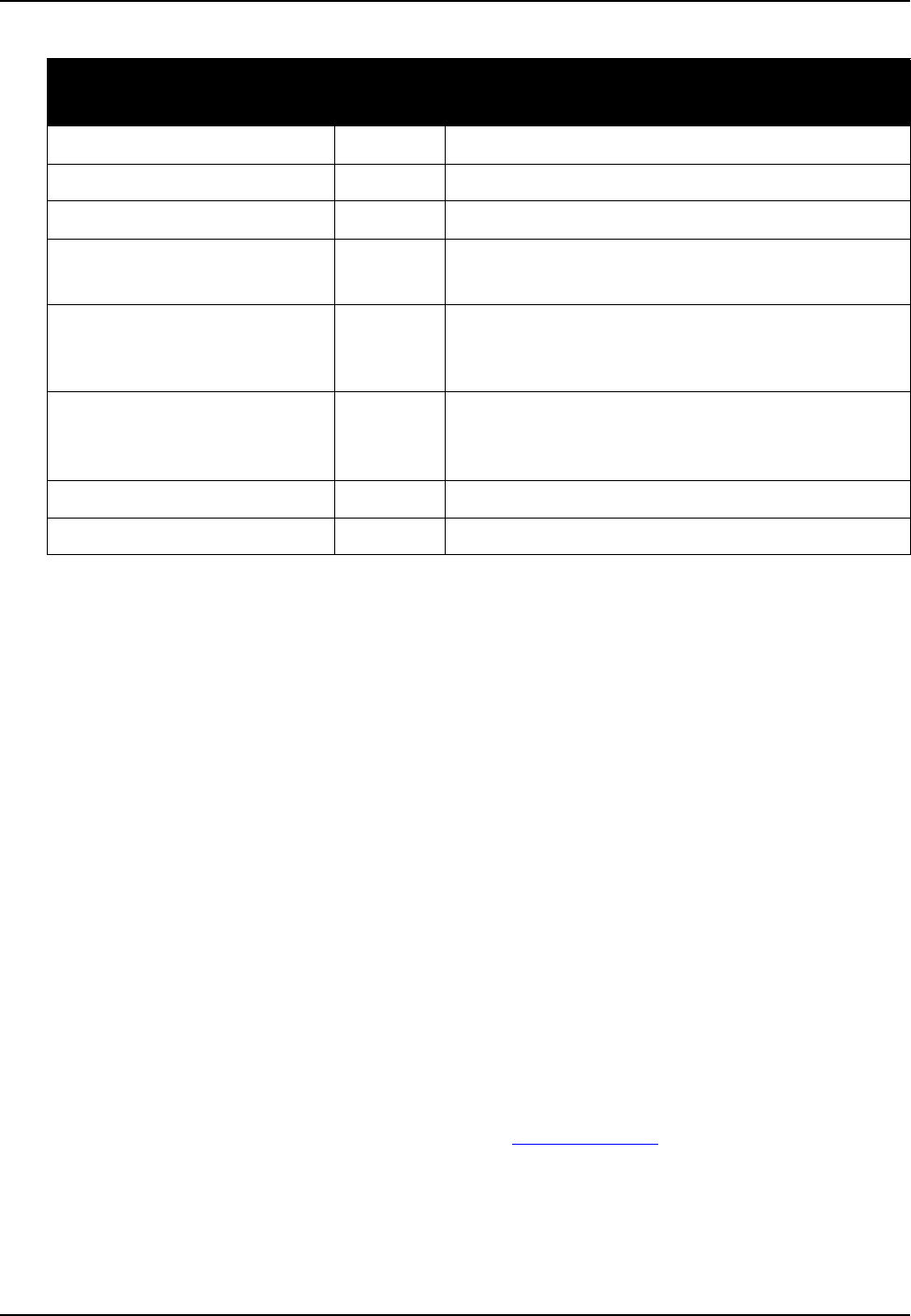
Table 6: Logs with Azimuth data
3.4 Data Collection for Post-Processing
Some operations, such as aerial measurement systems, do not require real time information from SPAN.
These operations are able to generate the position, velocity or attitude solution post-mission in order to
generate a more robust and accurate solution than is possible in real time.
In order to generate a solution in post-processing, data must be simultaneously collected at a base
station and each rover. The following logs must be collected in order to successfully post-process data
From a base:
• RANGECMPB ONTIME 1
• RAWEPHEMB ONCHANGED
• GLOEPHEMERISB ONCHANGED (if using GLONASS)
From a rover:
• RANGECMPB ONTIME 1
• RAWEPHEMB ONCHANGED
• GLOEPHEMERISB ONCHANGED (if using GLONASS)
• RAWIMUSXB ONNEW
• VEHICLEBODYROTATIONB ONCHANGED
• IMUTOANTOFFSETSB ONCHANGED
Post-processing is performed through the Waypoint Inertial Explorer software package available from the
NovAtel Waypoint Products Group. Visit our Web site at www.novatel.com
for details.
Log
Log
Format
Azimuth Source
INSPVA / INSPVAS / INSPVAX NovAtel Inertial
INSATT / INSATTS / INSATTX NovAtel Inertial
PASHR NMEA Inertial
INSSPD NovAtel Course Over Ground
Computed using the INS solution only
BESTVEL NovAtel Course Over Ground
From the best system solution which could be either
GNSS or INS
GPVTG NMEA Course Over Ground
From the best system solution which could be either
GNSS or INS
HEADING NovAtel ALIGN
GPHDT NMEA ALIGN