



















30 SPAN-IGM User Manual Rev 2
Chapter 3 SPAN Operation
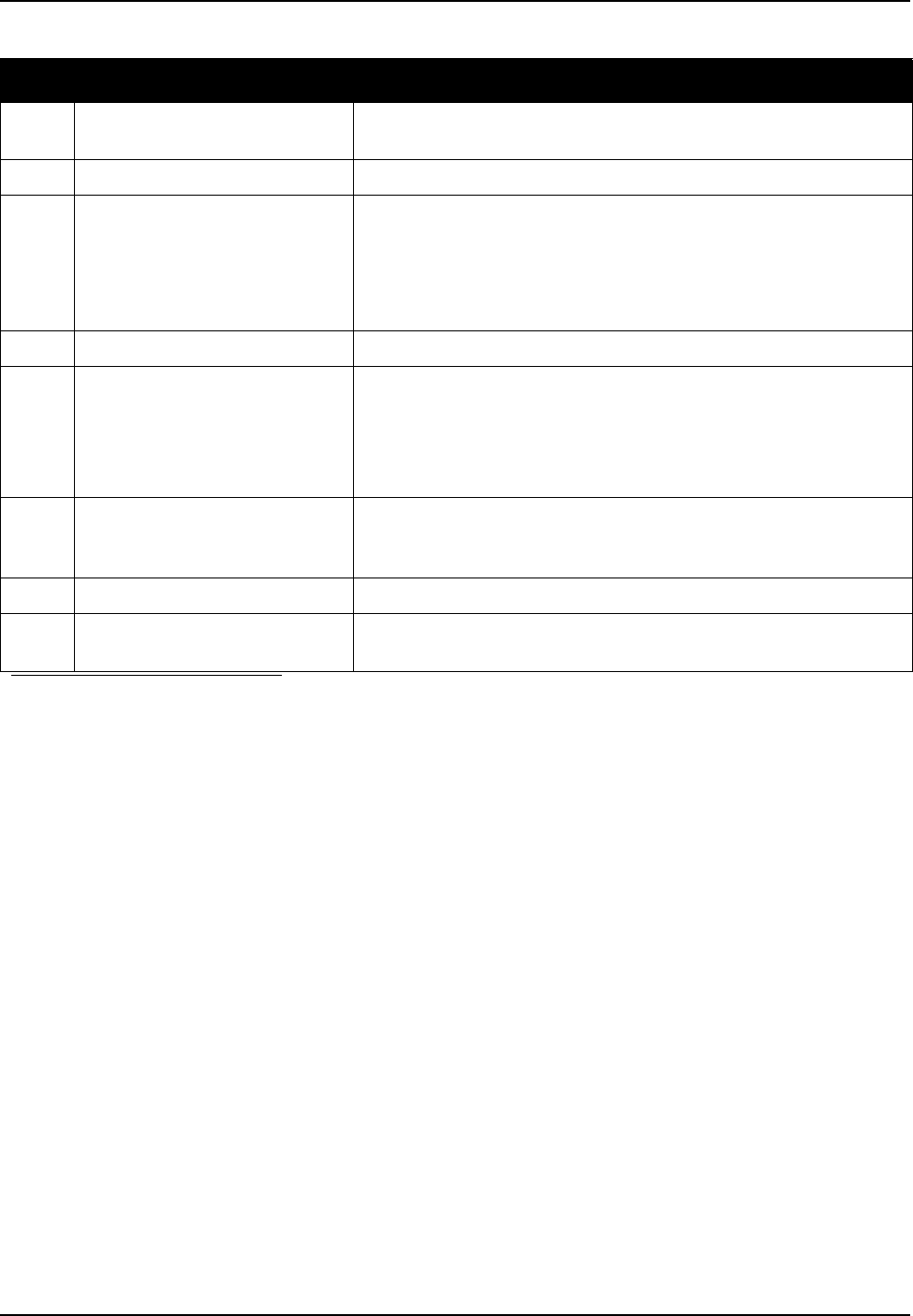
Table 4: Inertial Solution Status
3.2.1 System Start-Up and Alignment Techniques
The system requires an initial attitude estimate to start the navigation filter. This is called system
alignment. On start-up the system has no position, velocity or attitude information. When the system is
first powered up, the following sequence of events happens:
1. The first satellites are tracked and coarse time is solved.
2. Enough satellites are tracked to compute a position.
3. Receiver “fine time” is solved, meaning the time on board the receiver is accurate enough to begin
timing IMU measurements.
4. Raw IMU measurements begin to be timed by the receiver and are available to the INS filter. They
are also available in the RAWIMU, RAWIMUS, RAWIMUX, and RAWIMUSX logs. The INS Status
field changes from INS_INACTIVE through DETERMINING_ORIENTATION and
WAITING_INITIALPOS during this period.
5. The inertial alignment routine starts and the INS Status field reports INS_ALIGNING.
For information about the methods used to complete the alignment routine, refer to the alignment
modes described in the following sections.
• Kinematic Alignment on page 31
• Manual Alignment on page 31
• Dual Antenna Alignment on page 31
Binary ASCII Description
0
INS_INACTIVE
IMU logs are present, but the alignment routine has not started;
INS is inactive.
1
INS_ALIGNING INS is in alignment mode.
2
INS_HIGH_VARIANCE
The INS solution is in navigation mode but the azimuth solution
uncertainty has exceeded the threshold. The default threshold is 5
degrees.
a
The solution is still valid but you should monitor the
solution uncertainty in the INSCOV log. You may encounter this
state during times when the GNSS, used to aid the INS, is absent.
b
3
INS_SOLUTION_GOOD The INS filter is in navigation mode and the INS solution is good.
6
INS_SOLUTION_FREE
The INS filter is in navigation mode and the GNSS solution is
suspected to be in error.
This may be due to multipath or limited satellite visibility. The
inertial filter has rejected the GNSS position and is waiting for the
solution quality to improve.
7
INS_ALIGNMENT_COMPLETE
The INS filter is in navigation mode, but not enough vehicle
dynamics have been experienced for the system to be within
specifications.
8
DETERMINING_ORIENTATION INS is determining the IMU axis aligned with gravity.
9
WAITING_INITIALPOS
The INS filter has determined the IMU orientation and is awaiting
an initial position estimate to begin the alignment process.
a. This value is configured using the INSTHRESHOLDS command. See the SPAN on OEM6 Firmware Reference
Manual (OM-20000144) for more information.
b. See also question #4 in Appendix B, Frequently Asked Questions on page 60.