SPAN Installation Chapter 2
SPAN-IGM User Manual Rev 2 25
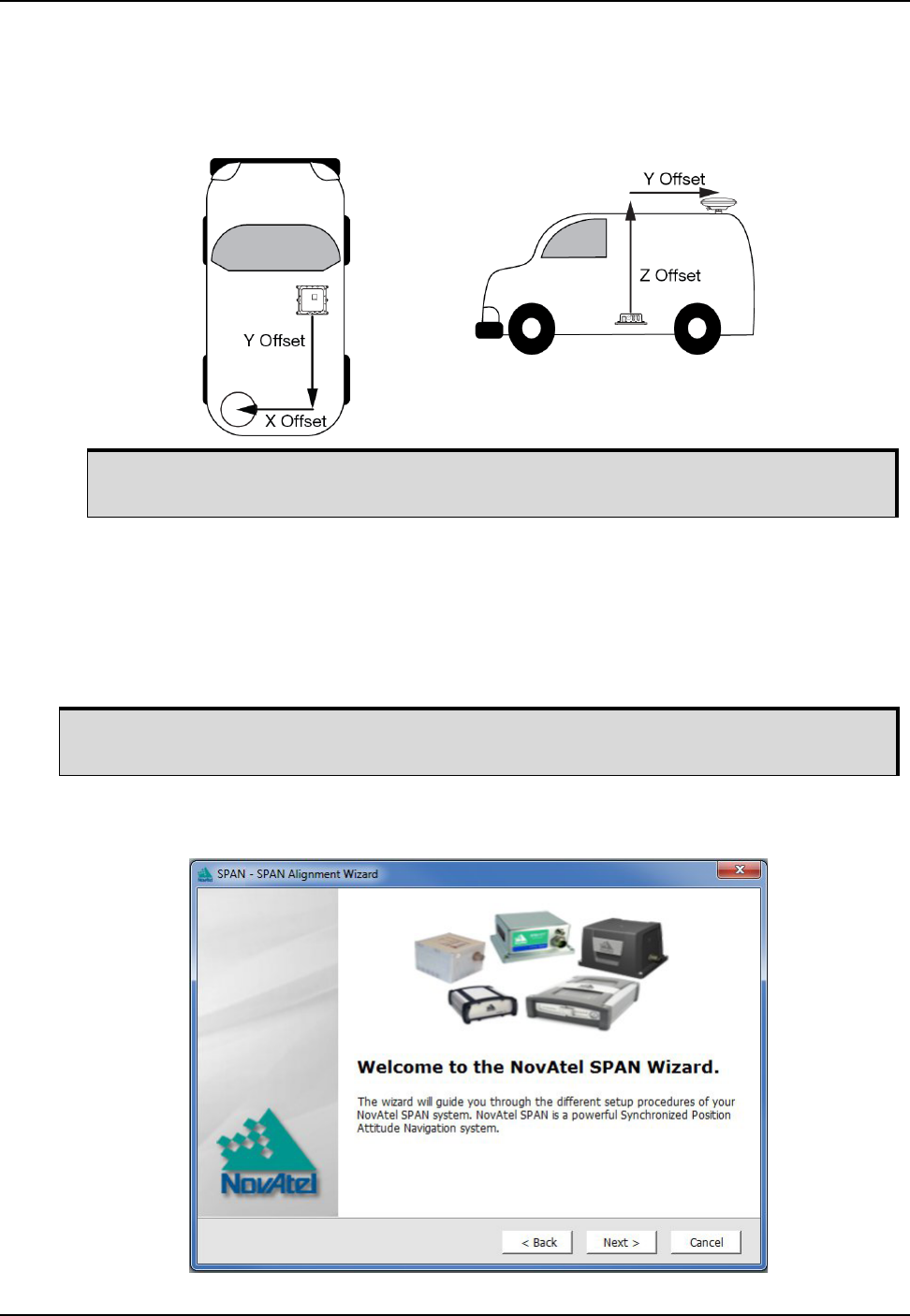
The offset between the antenna phase center and the IMU axis must remain constant and be known
accurately (m). The X (pitch), Y (roll) and Z (azimuth) directions are clearly marked on the SPAN-IGM
enclosure. The SETIMUTOANTOFFSET parameters are (where the standard deviation fields are
optional and the distances are measured from the SPAN-IGM to the antenna):
x_offset y_offset z_offset [x_stdev] [y_stdev] [z_stdev]
A typical RTK GNSS solution is accurate to a few centimetres. For the integrated GNSS + INS
system to have this level of accuracy, the offset must be measured to within a centimetre. Any offset
error between the two systems shows up directly in the output position. For example, a 10 cm error in
recording this offset will result in at least a 10 cm error in the output.
2.4.2.2 Configure SPAN with Connect
Follow these steps to enable INS as part of the SPAN system using the NovAtel Connect software utility:
1. SPAN basic configuration: Select Wizards | SPAN Alignment from the Connect toolbar. This wizard
takes you through the steps to complete an alignment and configure the receiver port to accept IMU
data.
This example assumes a default mounting configuration and shows a -X offset, -Y
offset and +Z offset.
The NovAtel Connect screen shots in this manual may differ from your version of NovAtel
Connect.

































































