



















E Comparison Of RT-2 And RT-20
226 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
RT-2 Performance
The RT-2 software provides the accuracies shown in Table E-3 & Figure E-1 (static mode) and Table E-4 &
Figure E-2 (kinematic mode) for “typical” multipath, ionospheric, tropospheric, and ephemeris errors, where
“typical” is described as follows:
• A typical multipath environment would provide no carrier-phase double-difference multipath errors
greater than 2 cm or pseudorange double-difference multipath errors greater than 2 m on satellites at 11°
elevation or greater. For environments where there is greater multipath, please consult NovAtel Customer
Service.
• Typical unmodeled ionospheric, tropospheric and ephemeris errors must be within 2
σ
of their average
values, at a given elevation angle and baseline length. It is assumed that the tropospheric correction is
computed with standard atmospheric parameters. All performance specifications assume that at least 6
satellites above the mask angle (varies between 11 and 14 degrees) are being tracked on both L1 and L2.
In Tables E-3 and E-4, accuracy values refer to horizontal RMS error, and are based on matched positions. There
are no data delays for a matched log and therefore no need to add anything. The level of position accuracy at any
time will be reflected in the standard deviations output with the position.
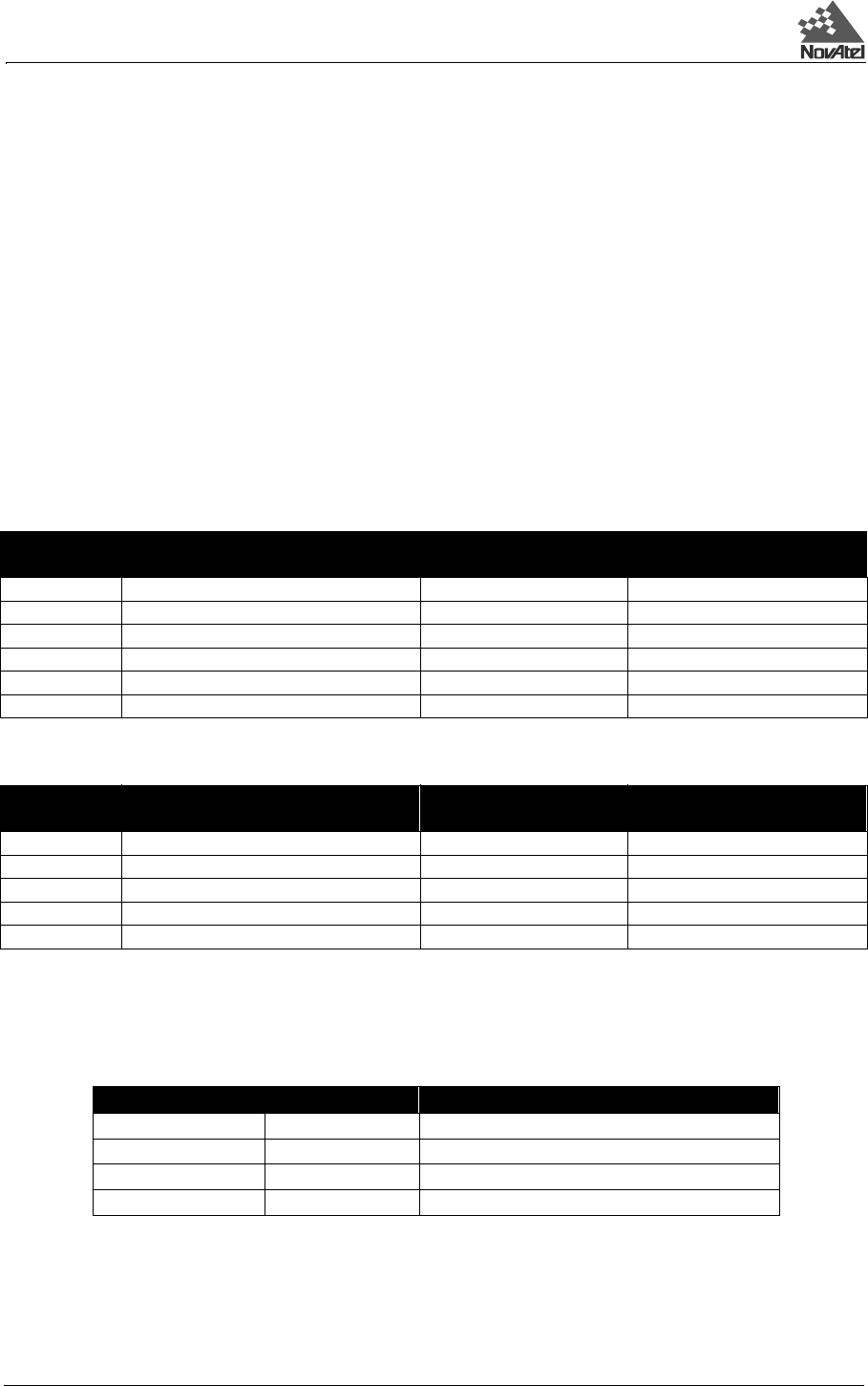
Table E-3 RT-2 Performance: Static Mode
Table E-4 RT-2 Performance: Kinematic Mode
PRTK logs contain some error due to predictions from base station observations. The expected error of a PRTK
log will be that of the corresponding RTK log plus the appropriate error from Table E-5.
Table E-5 RT-2 Degradation With Respect To Data Delay
➀
See Section A.3, Page 64 for an overview of GPS positioning.
Baseline
length
Time since L2 lock-on with at least
6 satellites above mask angle
Horizontal accuracy at
the stated time
Runs meeting the stated
accuracy at the stated time
< 10 km 70 seconds + 1.5 sec/km 2 cm + 0.5 ppm 75.0%
< 10 km 5 minutes 1 cm + 1 ppm 75.0%
< 15 km 4 minutes 5 cm 66.7%
< 25 km 7 minutes 7 cm 66.7%
< 35 km 10 minutes 35 cm 66.7%
< 35 km 30 minutes 25 cm 66.7%
Baseline
length
Time since L2 lock-on with at least
6 satellites above mask angle
Horizontal accuracy at
the stated time
Runs meeting the stated
accuracy at the stated time
< 10 km 120 seconds + 1.5 sec/km 2 cm + 0.5 ppm 75.0%
< 15 km 8 minutes 8 cm 66.7%
< 25 km 14 minutes 10 cm 66.7%
< 35 km 20 minutes 40 cm 66.7%
< 35 km 60 minutes 25 cm 66.7%
Data Delay (sec) Distance (km) Accuracy (CEP)
0 - 2 1 +1 cm/sec
2 - 7 1 +2 cm/sec
7 - 30 1 +5 cm/sec
>30 1 single point or pseudorange differential positioning ➁
➀ Mode = Static or Kinematic
➁ After 30 seconds reverts to pseudorange positioning (single point or differential depend-
ing on messages previously received from the base station).