



















Pelco Manual C539M-A (12/01) 13
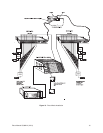
3.2.2 9760 SYSTEM HOOKUP (P Protocol)
Two possibilities are:
1. Single or multiple translators hooked to unique Sercom ports on a system matrix
switch, or
2. Item (1) with the addition of cascaded translators added to the mix.
The second possibility (item 2) encompasses the first, so a system hookup illustrating it is
shown in Figure 14.
3.2.3 DX7000 CONTROLLER HOOKUP (D Protocol)
Only one possibility is available for DX7000 control of the CXTA. That configuration, along
with hookup details, is shown in Figure 15. Note the viewing advantage in that one to six-
teen interfaced receiver inputs can be viewed at the same time on the system monitor.
Moreover, views can also be captured and recorded.
3.2.4 MPT9500 CONTROLLER HOOKUP (D Protocol)
Since the MPT9500 can be configured for D protocol, it can be used to control the CXTA.
This is not an advantage with respect to direct control of Coaxitron receivers (the MPT9500
is Coaxitron capable); however, there are two viable possibilities:
1. If you want to combine control of existing D protocol equipment with Coax control of
CXTA connected receivers on the same data line
2. If you want to control and view more than one Coaxitron receiver at a time without the
necessity of an intervening manual switcher.
An illustration of item two is shown in Figure 16.
NOTE:
When running the
translator from ports hooked
to a CM9760 System (system
mode), configure the
communication parameters of
the CM9760 on that port for
“even” parity or the translator
will not work. Direct mode
(see previous configuration)
is not a concern since the
CM9760-KBD is configured
by default for even parity.